Как то я уже делал своего первого 4-х колесного робота с использованием платы Arduino + TP-Link TL-MR3020 + OR-WRT + вебка Logitech + 4-х колесная платформа. Благодаря прошивке OR-WRT вмешательство в роутер было минимальное, за что спасибо товарищу elmot. Пришлось немного повозится с тележкой, т.к. была отобрана неудачно и 3 из 4 моторчиков издавали такой эл. шум, что управлять тележкой было невозможно (не слушалась). Вообщем эта проблема была решена с помощью конденсаторов.
Мой старый бот:
Хоть это моя и первая разработка, но понравилась не сильно. Не очень практично получилось - много железа, тяжелая, много жрет (на 4 моторчика и ардуину+роутер+вебка уходит 13 акумов по 1.2В) + если ездить в полную скорость, конденсаторы на моторчиках не спасают от шумов.
Мой новый бот.
По этому взял виртурилку и суть идеи подобная:
1) колесная платформа
2) камера
3) несколько датчиков.
4) Управление через веб интерфейс,
5) Так же будет отдельная прога на андроиде.
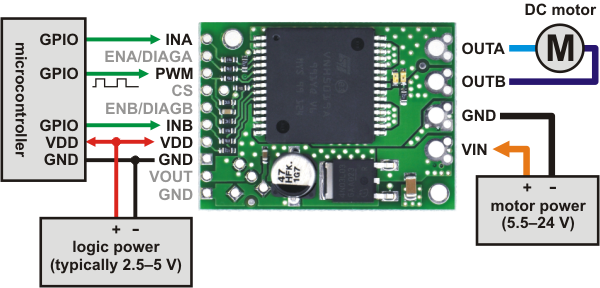
Но обо всем по порядку. Сейчас остановился на тележке Dagu Wild Thumper 6WD - дорогая зараза, но мощная. Прошу совета в выборе драйверов двигателей, т.к. виртурилка с такими моторчиками не справится. У меня пока один вариант - http://www.pololu.com/product/1451 - взять таких 2шт. и связать по 3 моторчика на 1шт. Что скажете по этому поводу? Может что нибудь получше есть? Стоит учесть тот факт, что виртурилка способна отдать 3.3В.
Вообщем, буду рад советам, возможно у кого-то какие идеи будут на счет датчиков и не только - пишите

О результатах постараюсь отписываться здесь.