roboforum.ruТехнический форум по робототехнике. |
| Текущее время: 19 июн 2026, 18:30 |
roboforum.ruТехнический форум по робототехнике. |
| Текущее время: 19 июн 2026, 18:30 |
|
Часовой пояс: UTC + 4 часа |
 
|
Страница 7 из 30 |
[ Сообщений: 448 ] | На страницу Пред. 1 ... 4, 5, 6, 7, 8, 9, 10 ... 30 След. |
|
| Автор | Сообщение | ||||
|---|---|---|---|---|---|
| Nesenin |
|
||||
Зарегистрирован: 26 янв 2012, 03:59 Сообщения: 1345 Откуда: Казань прог. языки: LabVIEW ФИО: Никита Есенин |
|
||||
| Вернуться к началу | |||||
| Nesenin |
|
||||
Зарегистрирован: 26 янв 2012, 03:59 Сообщения: 1345 Откуда: Казань прог. языки: LabVIEW ФИО: Никита Есенин |
|
||||
| Вернуться к началу | |||||
| Myp |
|
|||||
Зарегистрирован: 18 сен 2006, 12:26 Сообщения: 18018 Откуда: Тверь по прозвищу Дверь прог. языки: псевдокод =) сила в алгоритме! ФИО: глубокоуважаемый Фёдор Анатольевич |
|
|||||
| Вернуться к началу | ||||||
| Nesenin |
|
||||
Зарегистрирован: 26 янв 2012, 03:59 Сообщения: 1345 Откуда: Казань прог. языки: LabVIEW ФИО: Никита Есенин |
|
||||
| Вернуться к началу | |||||
| Angel71 |
|
||||
Зарегистрирован: 18 апр 2009, 22:18 Сообщения: 10668 |
|
||||
| Вернуться к началу | |||||
| Nesenin |
|
||||
Зарегистрирован: 26 янв 2012, 03:59 Сообщения: 1345 Откуда: Казань прог. языки: LabVIEW ФИО: Никита Есенин |
|
||||
| Вернуться к началу | |||||
| EDV |
|
||||
Зарегистрирован: 06 июн 2007, 15:19 Сообщения: 1016 Откуда: Украина, Лисичанск ФИО: Дмитрий Еремеев |
|
||||
| Вернуться к началу | |||||
| Nesenin |
|
||||
Зарегистрирован: 26 янв 2012, 03:59 Сообщения: 1345 Откуда: Казань прог. языки: LabVIEW ФИО: Никита Есенин |
|
||||
| Вернуться к началу | |||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
| EDV |
|
||||
Зарегистрирован: 06 июн 2007, 15:19 Сообщения: 1016 Откуда: Украина, Лисичанск ФИО: Дмитрий Еремеев |
|
||||
| Вернуться к началу | |||||
| Nesenin |
|
||||
Зарегистрирован: 26 янв 2012, 03:59 Сообщения: 1345 Откуда: Казань прог. языки: LabVIEW ФИО: Никита Есенин |
|
||||
| Вернуться к началу | |||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
| EDV |
|
||||
Зарегистрирован: 06 июн 2007, 15:19 Сообщения: 1016 Откуда: Украина, Лисичанск ФИО: Дмитрий Еремеев |
|
||||
| Вернуться к началу | |||||
| Nesenin |
|
||||
Зарегистрирован: 26 янв 2012, 03:59 Сообщения: 1345 Откуда: Казань прог. языки: LabVIEW ФИО: Никита Есенин |
|
||||
| Вернуться к началу | |||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
|
|
Страница 7 из 30 |
[ Сообщений: 448 ] | На страницу Пред. 1 ... 4, 5, 6, 7, 8, 9, 10 ... 30 След. |
|
Часовой пояс: UTC + 4 часа |
Кто сейчас на конференции |
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 17 |
| Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения |










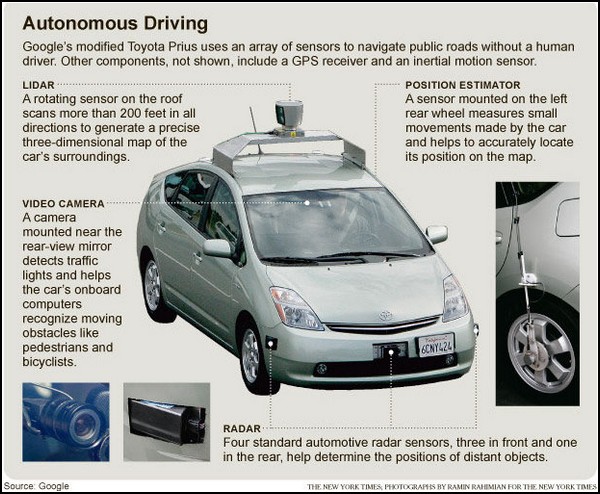
 не может быть частью системы зрения?
не может быть частью системы зрения?  у EDV'а оно распознает образы, скажем никакой лидар не даст опознавание автомобильных знаков, лиц и т.п.
у EDV'а оно распознает образы, скажем никакой лидар не даст опознавание автомобильных знаков, лиц и т.п.
{kind=link}