немного инфы по проекту. прикупил для экспериментов мыши:
корпус прозрачный было видно что схемка пустая что хорошо под переделку.
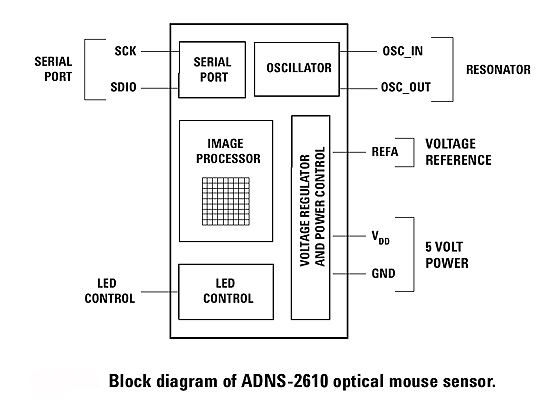
и правда там из дополнительных элементов только конденсаторы на линии питания, кнопки, да токоограничивающий резистор на светодиоде.
попробовал заменить светодиод на ИК. работает!

попробовал заменить оптику...тут 2 случая:
1)оптика с фокусом на определенном расстоянии. можно увеличить расстояние. проблема в узком рабочем диапазоне и с яркостью освещения. без мощной подсветки просто не видит ничего.

2)оптика с фокусом в "бесконечность". широкий рабочий диапозон. проблемы с слишком широким углом обзора. нужно искать подходящую с малым углом. проблема с яркостью картинки. не видит ничего кроме фонарика направленного в объектив!

Рязанские студенты судя по фото\видео вопрос яркости решили не без тяжелой артиллерии - мощные лазеры направленные в пол:


и еще не понятно что у них с рабочим диапазоном.
что мне делать хз. наверно нужно искать оптику мутить освещение.
Машинку до оборудовал турелью с лазером.
Лазер сразу на ШИМ повесил что б потом заменить на водяной насос\мотор гиарбокса в зависимости от перевооружения.
Дополнил прошивку Arduino. Теперь она делает 3 вещи: считывает\обрабатывает данные от РУ приемника, считывает данные по i2c от 3х осевого компаса(код для акселирометра\гироскопа и барометра\термометра пока не добавил за ненадобностью) и шлет по usb, принимает команды с компа по управлению движением\сервами\лазером. Причем приоритет управления РУ оставлен. То есть при включении пульта РУ отключается прием\исполнение команд с компа.
Для тестирования управления сервами\лазером накатал ПО с использованием мыши то есть одновременно управляются сразу 2 сервы по движению мыши как в играх-стрелялках. Скажу я вам удобнейшее управление!
По сравнению с управлением с пульта, где используется подпружиненный рычажок, разница огромна. она и в скорости и в точности и в удобстве. а я ведь целый год гоняю это
с пульта прицелиться то трудно. не то чтоб сопровождать цель.
Кстати с мышиным управлением ощутил всю прелесть скорости работы серв. После моей турели с контролем по лазеру, так вообще чудо! Проблема только в точности. То есть минимальный шаг, программно ограничен в 1гр для сервы( в то время как привод на моей турели имеет шаг 0.063гр), при этом наровит куда нибудь уплыть и есть подозрения что физически там >1гр. В конечном счете от этих углов зависит на каком удалении в какую мишень по размерам можно прицелиться. Например для 1гр шаг на расстоянии 2м будет tan(1)*2=0.035м(округлил) в мышей особо не постреляешь. только в котов.
PS. Контроллер питания робота с подключением любых аккумуляторов с зарядкой\балансировкой оных с передачей данных о заряде по USB и команд на выключение.
http://www.mini-box.com/OpenUPS?sc=8&category=1264 http://www.dont.ru/mini-box-OpenUPS.id16203.htmlНу просто супер вешь! То что не хватает моему роботу для доведения до полной автономности. Так чтоб он знал что у него с зарядом, когда надо ехать на подзарядку и когда в случае чего надо отключиться.
Для непрерывной работы по написанию кода\отладки все же имеет смысл провод питания подвесить над роботом. Этакий вариант на привязи.
Добавлено спустя 5 минут 25 секунд:ЗЫ а компас и правда всякую хрень показывает. у меня тут металлических предметов хватает конечно, да и неодимовых магнитов несколько сотен в столе... эхехех