И на коллекторных моторах можно ездить плавно. Мне кажется, что автор ленится: искать информацию не хочет, готовые схемы просит. А ведь ему без намеков говорят: дело это сложное, чтоб стать специалистом надо кучу деталей пережечь. Он же в ответ: вы специалисты, дайте мне выжимки ваших знаний. Да если бы это было возможно, то не надо было бы ни в школах, ни в институтах учиться: специалисты бы копировали знания студентам прямо в мозг. Нет, чтобы научиться сложной штуке - надо пройти тернистый путь. Готовы? Один шаговый двигатель в наличии - этого не достаточно. Если же конечная цель - вышеописанный паравозик, то проще продать шаговик, добавить денег и купить игрушечную железную дорогу.
ЗЫ. Мы не сидим на схемах того, что вам нужно. Но у нас есть знания, чтобы мы могли разработать такое. Знания эти добыты тяжелым трудом. Без него ничего не получится. Делать за вас никто не будет. А вот помочь советом - запросто. Но для этого надо начать уже делать что-то.
roboforum.ru
Технический форум по робототехнике.
управления ШД двумя кнопками возможно ?
Re: управления ШД двумя кнопками возможно ?
Радист я не говорю дайте мне готового девайса. С паяльником дружу ооооочень давно но с цифровой техникой нет. И составить схем тоже не умею но я быстро обучаемый если бы вы дали советов и я без трудностей справлюсь. Мне вот хочеться сделать шаг вперед с вашей помошью
завтра я уточню характеристики ШДей и сообщу. груз будет до 10 кг это точно
завтра я уточню характеристики ШДей и сообщу. груз будет до 10 кг это точно
Re: управления ШД двумя кнопками возможно ?
10 кг это очень много! 4в 1А явно очень мало будет
Re: управления ШД двумя кнопками возможно ?
значит непойдет. можно опенроботикс плату посмотреть
Re: управления ШД двумя кнопками возможно ?
пожалуйста купить не предлагайте я хочу сделать все сам конечно с вашей помощью. Это че за плата опенроботикс. А про груз ! СРТ мониторы еще работают !!!!
Re: управления ШД двумя кнопками возможно ?
мда, чукча не читатель
Re: управления ШД двумя кнопками возможно ?
Скажите а вот это схема будет работать и насколько хороша.
- Вложения
-
Re: управления ШД двумя кнопками возможно ?
Резисторы трехсотграммовые стоят, а тебе 10 кг надо
Re: управления ШД двумя кнопками возможно ?
Схема выше - только для униполярного двигателя,еще нужно суметь найти подходящий контроллер и суметь запрограммировать его.
Re: управления ШД двумя кнопками возможно ?
А что сюда добавить или убрать посоветуйте
Re: управления ШД двумя кнопками возможно ?
Вообще-то для начала надо вообще "схему подъездных путей"  Ибо, как показывает практика, "завтра" захочется доставку грузов ещё и коммутировать
Ибо, как показывает практика, "завтра" захочется доставку грузов ещё и коммутировать
Сам делал "железную дорогу". Правда та возила где-то килограмм. Зачем там шаговик??? Я использовал no-name коллекторник купленный на свал.. пардон на толкучке. Выбрал конкретный экземпляр, по причине присоединённого готового червячного редуктора. Подобрал напругу и управление сделал вообще тупо, "Н-мост" на переключателе Сделать, чтобы автоматом ездило по "станциям" тоже не проблема. Безо всяких контроллеров, просто набором контактов.
На 10 кг, возьмите стеклоподъёмник. Он с червяком сразу. Рельсы = провода. Справа "+", слева "-" едет в одну сторону, переполюсовали - в другую. Контакты - металлические колёса. Только колёс надо побольше для обеспечения надёжности контакта. Оси колёсных пар - пластиковые или вообще деревянные.
Ибо, как показывает практика, "завтра" захочется доставку грузов ещё и коммутировать Сам делал "железную дорогу". Правда та возила где-то килограмм. Зачем там шаговик??? Я использовал no-name коллекторник купленный на свал.. пардон на толкучке. Выбрал конкретный экземпляр, по причине присоединённого готового червячного редуктора. Подобрал напругу и управление сделал вообще тупо, "Н-мост" на переключателе
Сделать, чтобы автоматом ездило по "станциям" тоже не проблема. Безо всяких контроллеров, просто набором контактов.На 10 кг, возьмите стеклоподъёмник. Он с червяком сразу. Рельсы = провода. Справа "+", слева "-" едет в одну сторону, переполюсовали - в другую. Контакты - металлические колёса. Только колёс надо побольше для обеспечения надёжности контакта. Оси колёсных пар - пластиковые или вообще деревянные.
Re: управления ШД двумя кнопками возможно ?
+1
ага, и защиту от КЗ на рельсах, а то выпадет из вагончика что-нить железное
ага, и защиту от КЗ на рельсах, а то выпадет из вагончика что-нить железное
Re: управления ШД двумя кнопками возможно ?
Точно. Про КЗ забыл. У мну-то была версия для детского учреждения, там железобетонное требование "только на батарейках".
Re: управления ШД двумя кнопками возможно ?
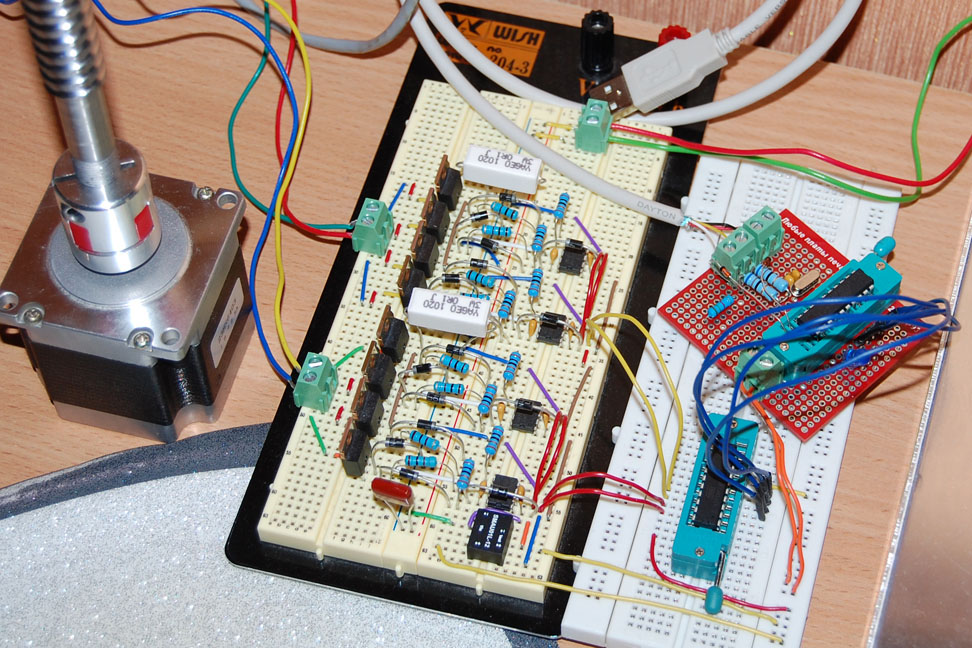
собрал недавно такое устройство. крутит биполярники.
вообщем чуть позднее размещу на сайте его схему и фотки тут http://www.openrobo.ru/control/driver
происходит все так - 3 устройства. 1 - контроллер USB, на него с проги на компе идут команды что делать.
команды принимает ШИМ-контроллер, он и регулирует мощность, а значит и возможность для скорости, я настроил просто на максимальную скорость (нужно настраивать на каждом блоке питания отдеально). потом ШИМ контроллер по командам от контроллера USB включает H-мосты через драйвер мостов и подает на них ШИМ сигнал. H-мосты в разных направлениях подают напряжение на обмотки. 4 комбинации подачи перебивараются образуя вращение. в результате путем уменьшения частоты отправки команд на USB ждем, пока не исчезнут щелчки, это и есть нужное время, у меня получилось очень быстро крутится - 2 мс всего между шагами. время разное для каждого двигателя может быть и блока питания, плюс вес того что нацеплено на двигатель может тормозить его. разница между не работает и работает без щелчков - 1 мс. на 1 не работает, на 3 щелчки.
Добавлено спустя 29 минут 51 секунду:
вот оно, готовое устройство, как и просил
Добавлено спустя 3 минуты 36 секунд:
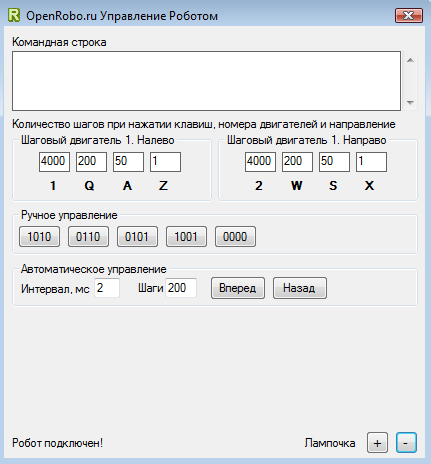
а вот и программа, которая управляет устройством
вообщем чуть позднее размещу на сайте его схему и фотки тут http://www.openrobo.ru/control/driver
происходит все так - 3 устройства. 1 - контроллер USB, на него с проги на компе идут команды что делать.
команды принимает ШИМ-контроллер, он и регулирует мощность, а значит и возможность для скорости, я настроил просто на максимальную скорость (нужно настраивать на каждом блоке питания отдеально). потом ШИМ контроллер по командам от контроллера USB включает H-мосты через драйвер мостов и подает на них ШИМ сигнал. H-мосты в разных направлениях подают напряжение на обмотки. 4 комбинации подачи перебивараются образуя вращение. в результате путем уменьшения частоты отправки команд на USB ждем, пока не исчезнут щелчки, это и есть нужное время, у меня получилось очень быстро крутится - 2 мс всего между шагами. время разное для каждого двигателя может быть и блока питания, плюс вес того что нацеплено на двигатель может тормозить его. разница между не работает и работает без щелчков - 1 мс. на 1 не работает, на 3 щелчки.
Добавлено спустя 29 минут 51 секунду:
вот оно, готовое устройство, как и просил
Добавлено спустя 3 минуты 36 секунд:
а вот и программа, которая управляет устройством