там по ссылке сказано что драйвер мотора не может создать достаточно малый ток в первом микрошаге сразу после геометрически целого шага.
тобишь если режим 1/16 то каждый 16 шаг драйвер не может сделать внятно, он просто не может выдать нужный ток, выдаёт минимально возможный, получается вал сразу прыгает на несколько шагов, а потом стоит.
в принципе на картинке получается достаточно красиво, с диодами синусоида ближе к синусоиде
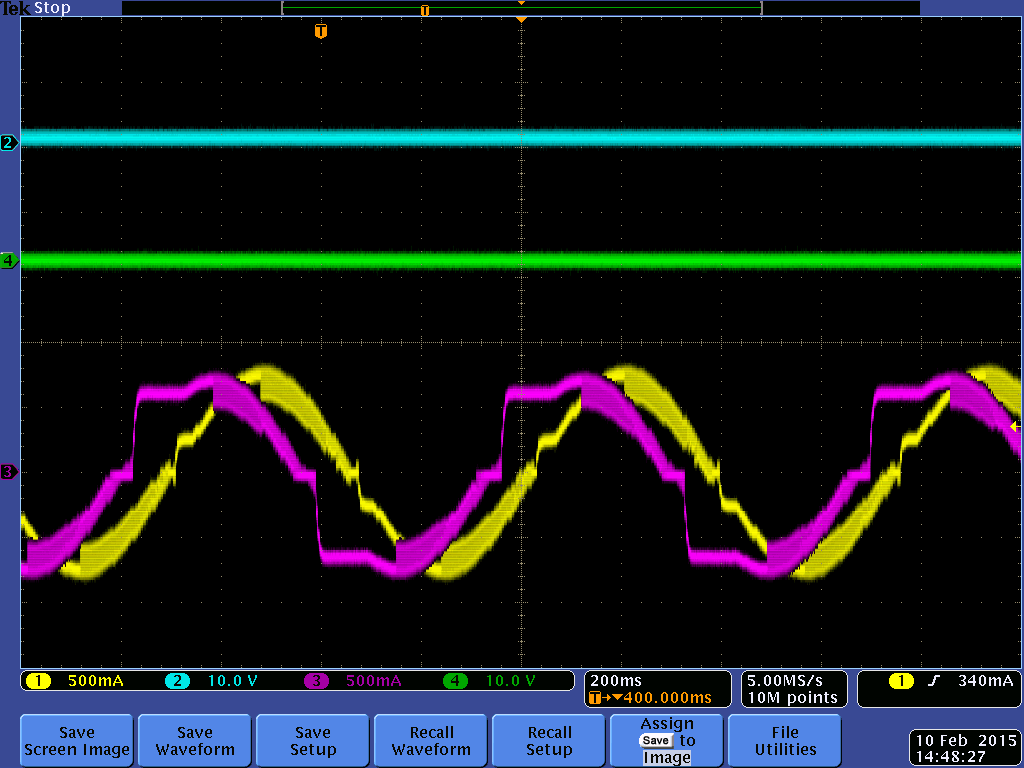
в начале каждой синусоиды ток растёт скачкообразно и вал тоже дёргается сразу на много.
связано с необходимостью драйвера тратить время на измерение тока и минимальным периодом шима который может генерировать драйвер.
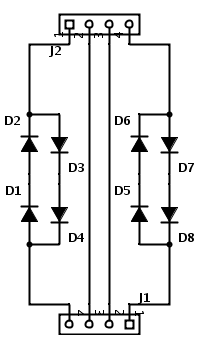
подсовывая диоды в цепь он позволяет драйверу выдавать этот самый очень малый ток и все микрошаги получаются чётко.
определённо очень заманчиво, пошёл паять диоды и ставить их в кабель, благо можно просто разрезать провод и впаять туда 4 диода.