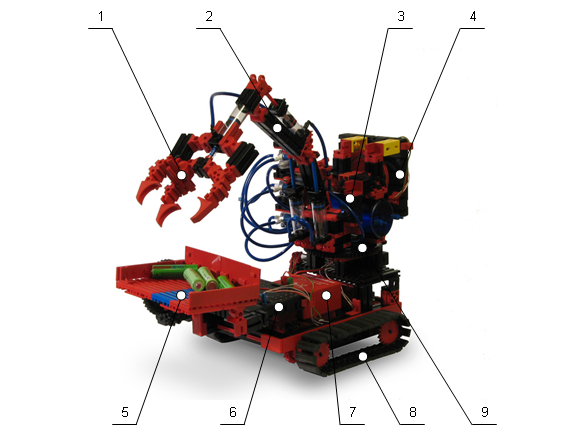
Мобильный робот «Чебурек-1»: 1 – схват манипулятора; 2 – рука манипулятора; 3 – компрессор; 4 – контроллер; 5 – корзина; 6 – контроллер; 7 – аккумулятор; 8 – гусеницы; 9 – поворотная платформа
Робот двигается по командам, которые подаются с пульта управления. Команды от пульта управления (джойстик-геймпад) поступают в ноутбук через интерфейс USB. В ноутбуке эти команды обрабатываются специальным программным обеспечением и передаются в бортовой контроллер робота через интерфейсы Bluetooth или USB. Специальное программное обеспечение выполняется на ноутбуке в среде графического программирования LabVIEW (демо версия с ограничением 30 дней).









