Решил опубликовать свой долгострой, поскольку появились хоть какие-то результаты.
Дело было вечером, делать было нечего... Попал в ДТП, машина надолго в ремонте, скучно. Наткнулся на вот такой проект от Boston Dynamics:

И что-то подумалось, что ничего сложного в нем нет, крути моторами в нужную сторону да и все... Как же я ошибался

В итоге только спустя два года появилось условно пригодное изделие, которое все равно в виде макета.
На самом деле, активных работ даже на месяц времени не накопилось, просто далеко не всегда было желание продолжать.
Управление оператором с использованием оборудования wifi но с особенным использованием стандарта 802.11. За основу взята кодовая база проекта OpenHD, случайно наткнулся на него.
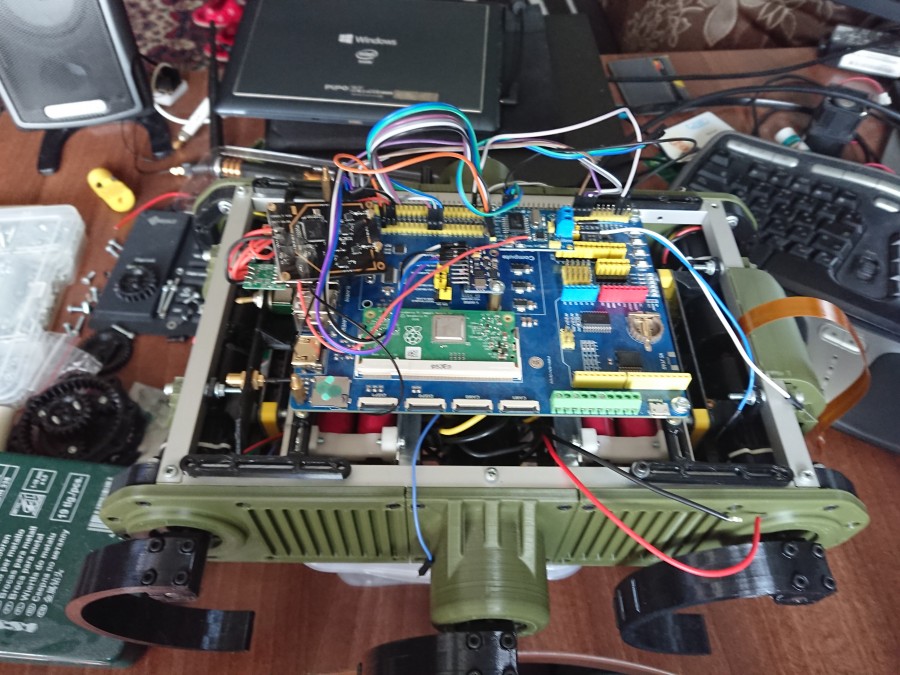
В качестве мозгов RaspberryPI CM3, планируется своя плата под нее, сейчас макетка.
Все моторы управляются индивидуально, фактически превращены в сервоприводы - управление путем задания угла поворота и скорости его достижения (трехконтурный регулятор пока не осилил, самый простой ПИД там),
Немного про постройку: