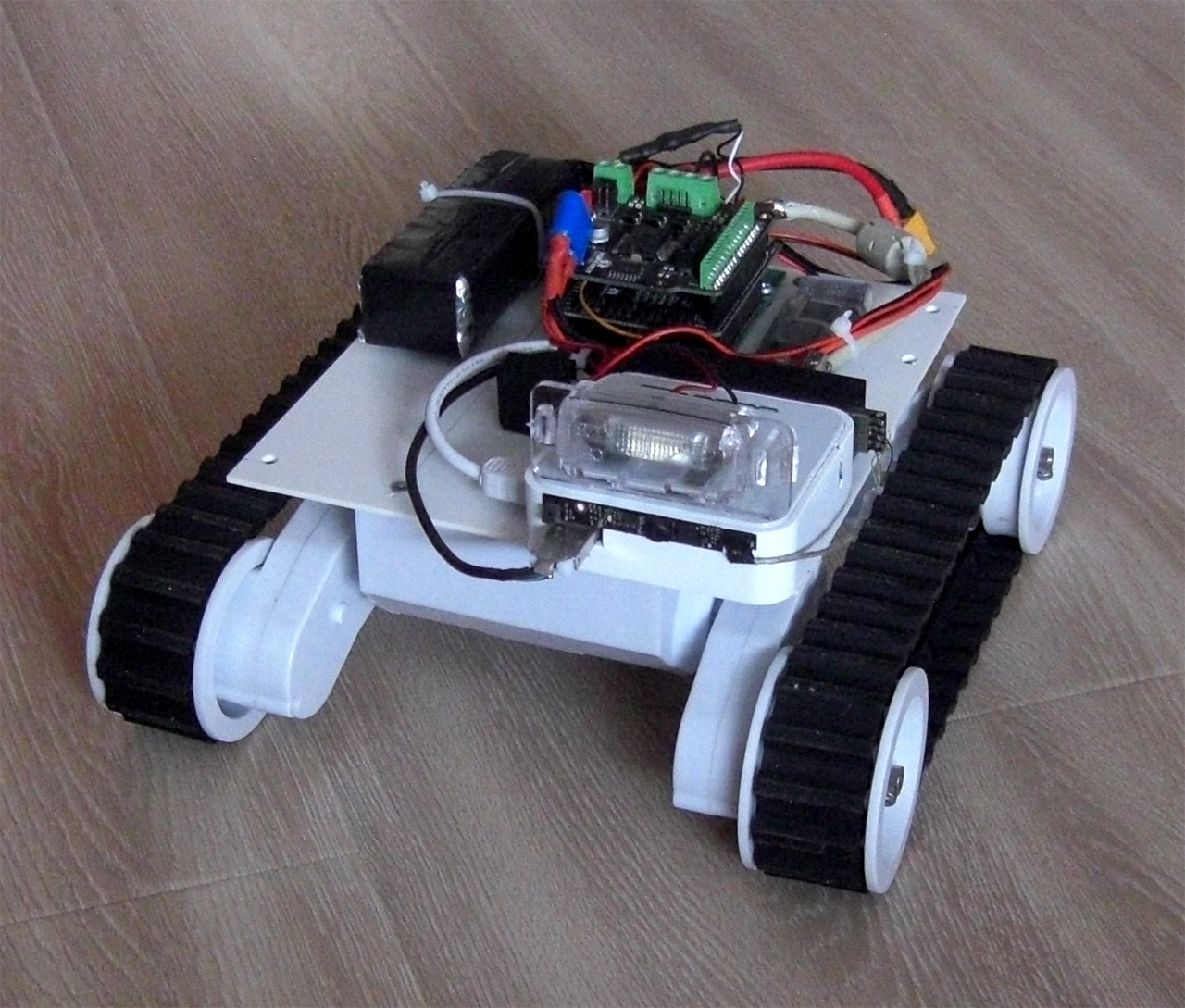
Итак: было приобретено шасси на гусеницах и установлены в него аккумуляторы от ноутбука с стабилизатором 5В.
Шасси было приобретено во тут http://robocraft.ru/shop/index.php?route=product/product&path=63&product_id=310
Стабилизатор для питания самой платы raspberry. Покупалjсь все по той же ссылке.
Сама плата
На плате установлена операционка Rasbian.
На макетке собрал драйвер управления на L293. Так же на макетку установлен гироскоп mpu-6050. Общаются с raspberry по шине I2C.
Добавлено спустя 15 минут 19 секунд:
в дальнейшем будет на шасси прикручена пластинка из оргстекла на которую будет смонтирована плата и доп оборудование.
Общаться с интернетом будет за счет вот такого WiFi адаптера Tp-Link TL-WN725N.
Завелся сразу из коробки, без установки доп драйверов.
Так же будет стоять и камера для rspberry pi. Камера конечно уже поюзанная но рабочая.
Буду припаивать проводники к плате камеры и ставить разъем для raspberry. Сам шлейф почему то так просто не купить у нас в городе
 . Хотя в Промэлектронике достаточно товаров.
. Хотя в Промэлектронике достаточно товаров.Для поворота камеру использоватся будет вот такой механизм на двух сервах.
Управлять им будет Raspberry напрямую с GPIO портов, как и моторами движения через L293.
Зарядка робота будет осуществлятся с док станции к которой надо будет подьехать. Для этого на передней части шасси установлены контакты для подзарядки
Добавлено спустя 3 минуты 30 секунд:
Питание будет разделено. Моторы будут питатся от аккумуляторов ноутбука, а сама распи от вот такого аккумулятора
P.S. Чтоб начать все расписывать пришлось его разобрать и немного модернизировать. Выглядел вот так
- 1414554253641.jpg (29.71 КиБ) Просмотров: 6519