http://www.robotshop.com/ca/en/wild-thumper-6v-dc-motor-751.html
но блин от туда доставка будет дороже чем сам товар

а в Китае чет найти не могу, хотя эти движки китайские
п.с. сравнение целой и убитой

| |
roboforum.ruТехнический форум по робототехнике. |
|
![]() slom » 12 ноя 2014, 17:30
slom » 12 ноя 2014, 17:30

![]() Angel71 » 12 ноя 2014, 19:02
Angel71 » 12 ноя 2014, 19:02

![]() slom » 12 ноя 2014, 22:04
slom » 12 ноя 2014, 22:04
![]() slom » 17 ноя 2014, 17:03
slom » 17 ноя 2014, 17:03
#include <BTCA2ALite.h>
#include <Servo.h> // Добавляем библиотеку
Servo myservoH; // Горизонтальная серва углы от 25 до 145 (центровка 85)
Servo myservoV; // Вертикальная серва углы от 0 до 35
const int H_SERVO_PIN = 7; // Горизонтальная серва подключена к пину 7
const int V_SERVO_PIN = 8; //Пин вертикального сервопривода 8
const float H_L_ANGLE = 180; // Максимальные угл поворота башни налево
const float H_R_ANGLE = 0; // Максимальные угл поворота башни направо
const float H_DEF_ANGLE = 89; // Дефолтный угол (центровка)
const float V_U_ANGLE = 70; // Максимальные угл поворота башни вверх
const float V_D_ANGLE = 4; // Максимальные угл поворота башни вниз
const float V_DEF_ANGLE = 55; // Дефолтный угол (центровка)
//Размер шага V_STEP и H_STEP побираем экспериментально для достижения нужной скорости поворота серв
const float V_STEP = 0.007; // Шаг - знаение отвечающее за скорость вращения по вертикали.
const float H_STEP = 0.012; // Шаг - знаение отвечающее за скорость вращения по горизонтали
float curVAngle = V_DEF_ANGLE; //Переменная текущего угла верт. сервы
float curHAngle = H_DEF_ANGLE; //Переменная текущего угла гор. сервы
bool moveServoVUp = false; //Флаг движения верт. сервы вверх
bool moveServoVDown = false; //Флаг движения верт. сервы вниз
bool moveServoHLeft = false; //Флаг движения гор. сервы влево
bool moveServoHRight = false; //Флаг движения гор. сервы вправо
btca2aLite btca2aLite; // Конструктор btca2aLite
// Для удобства подключения, затвор мосфета подключен к аналоговому входу A0, однако,
// входы A0-A6 можно использовать как цифровые, в коде будут нумероваться как 14-19
int SHOT = 12;
int Speed = 80; // Текущая максимальная скорость
int TSpeed = 150; // Скорость тупящего мотора при повороте
int RLSpeed = 200; // Скорость танкоаого разворота
#define Dir_L 2
#define Pwm_L 3
#define Brake_L 4
#define Dir_R 10
#define Pwm_R 11
#define Brake_R 9
enum States
{
WAITING,
READING,
RUNNING,
ERROR,
TIMEOUT
};
States state;
States onWait();
States onRead();
States onRun();
States onError();
States onTimeout();
void performServo();
void setup(){
Serial.begin(9600); // Скорость BT и порта должна быть 9600
//Моторы
pinMode (Pwm_L, OUTPUT);
pinMode (Dir_L, OUTPUT);
pinMode (Brake_L, OUTPUT);
pinMode (Pwm_R, OUTPUT);
pinMode (Dir_R, OUTPUT);
pinMode (Brake_R, OUTPUT);
digitalWrite (Pwm_L, LOW);
digitalWrite (Pwm_R, LOW);
digitalWrite (Brake_L, LOW);
digitalWrite (Brake_R, LOW);
// устанавливаем пин как вывод управления сервой
myservoH.attach(H_SERVO_PIN);
myservoV.attach(V_SERVO_PIN);
myservoH.write(curHAngle);
myservoV.write(curVAngle);
//Светодиод
pinMode(13, OUTPUT); // Инициализируем пин светодиода
digitalWrite(13, HIGH); // Светодиод выключен
}
void loop(){
btca2aLite.ReadCommand(); // Считывание принятых команд (кодов кнопок)
//---------- Движение Вперед —-------------
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_UP)) // Едет вперед если нажат курсор ВПЕРЕД
{
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_RIGHT)){ // Поворот направо при нажатии курсора ВПЕРЕД и ВЛЕВО
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, TSpeed);
digitalWrite (Dir_R, HIGH);
analogWrite (Pwm_R, Speed);
}
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_LEFT)){ // Поворот налево при нажатии курсора ВПЕРЕД и ВПРАВО
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, Speed);
digitalWrite (Dir_R, HIGH);
analogWrite (Pwm_R, TSpeed);
}
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, Speed);
digitalWrite (Dir_R, HIGH);
analogWrite (Pwm_R, Speed);
}
//--------- Движение Назад —-------------
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_DOWN)) // Едет назад если нажат курсор НАЗАД
{
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_RIGHT)){ // Поворот налево при нажатии курсора НАЗАД и ВЛЕВО
digitalWrite (Dir_L, LOW);
analogWrite (Pwm_L, TSpeed);
digitalWrite (Dir_R, LOW);
analogWrite (Pwm_R, Speed);
}
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_LEFT)){ // Поворот направо при нажатии курсора НАЗАД и ВПРАВО
digitalWrite (Dir_L, LOW);
analogWrite (Pwm_L, Speed);
digitalWrite (Dir_R, LOW);
analogWrite (Pwm_R, TSpeed);
}
digitalWrite (Dir_L, LOW);
analogWrite (Pwm_L, Speed);
digitalWrite (Dir_R, LOW);
analogWrite (Pwm_R, Speed);
}
//--------- Движение Влево (Танковый разворот) —-------------
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_LEFT )) // Едет вперед если нажат курсор ВПЕРЕД
{
digitalWrite (Dir_L, LOW);
analogWrite (Pwm_L, RLSpeed);
digitalWrite (Dir_R, HIGH);
analogWrite (Pwm_R, RLSpeed);
}
//--------- Движение Вправо (Танковый разворот) —-------------
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_RIGHT)) // Едет вперед если нажат курсор ВПЕРЕД
{
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, RLSpeed);
digitalWrite (Dir_R, LOW);
analogWrite (Pwm_R, RLSpeed);
}
//--------- движение горизонтальной сервы —-------------
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_RIGHT)) // Едет вперед если нажат курсор ВПЕРЕД
{
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, RLSpeed);
digitalWrite (Dir_R, LOW);
analogWrite (Pwm_R, RLSpeed);
}
//Вызываем функцию управление сервами
performServo();
//---------- Переключение скоростей —-------------
if(btca2aLite.Button(KEYCODE_BUTTON_X)) // servoV вниз
{
moveServoVDown = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_Y)) // servoH движется к 25
{
moveServoHRight = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_B)) // servoV вверх
{
moveServoVUp = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_A)) // servoH движется к 145
{
moveServoHLeft = true;
}
//------------------ Стоп —---------------------
// Если не нажата ни одна кнопка курсора происходит остановка, скорость 0 для каждого мотора
if (btca2aLite.ButtonReleased(KEYCODE_DPAD_UP) && btca2aLite.ButtonReleased(KEYCODE_DPAD_DOWN) && btca2aLite.ButtonReleased(KEYCODE_DPAD_LEFT) && btca2aLite.ButtonReleased(KEYCODE_DPAD_RIGHT)){
analogWrite (Pwm_L, 0);
analogWrite (Pwm_R, 0);
}
//Функция управления сервоприводами (вызывается в теле loop на каждой итерации)
//Выполняет изменения положения серв на подобранный шаг согласно установленным флагам движения
//Флаги устанавливаются согласно поступившим символам управления сервами
void performServo()
{
//Установлен флаг движения вверх и текущий угол не максимальный
if (moveServoVUp && curVAngle + V_STEP <= V_U_ANGLE)
{
//К текущему верт. углу прибавляем шаг
curVAngle += V_STEP;
}
//Установлен флаг движения вниз и текущий угол не минимален
else if (moveServoVDown && curVAngle - V_STEP >= V_D_ANGLE)
{
//От текущего верт. угла отнимаем шаг
curVAngle -= V_STEP;
}
//Установлен флаг движения влево и текущий угол не максимален
if (moveServoHLeft && curHAngle + H_STEP <= H_L_ANGLE)
{
//К текущему гор. углу прибавляем гор. шаг
curHAngle += H_STEP;
}
//Установлен флаг движения вправо и текущий угол не минимален
else if (moveServoHRight && curHAngle - H_STEP >= H_R_ANGLE)
{
//От текущего угла отнимаем гор. шаг
curHAngle -= H_STEP;
}
//Если было движние по вертикали
if (moveServoVUp || moveServoVDown)
{
myservoV.write(curVAngle);
}
//Если было движение по горизонтали
if (moveServoHLeft || moveServoHRight)
{
myservoH.write(curHAngle);
}
}
![]() slom » 18 ноя 2014, 17:32
slom » 18 ноя 2014, 17:32
![]() slom » 21 ноя 2014, 00:37
slom » 21 ноя 2014, 00:37
![]() avr123.nm.ru » 21 ноя 2014, 00:50
avr123.nm.ru » 21 ноя 2014, 00:50

![]() slom » 21 ноя 2014, 09:46
slom » 21 ноя 2014, 09:46
![]() avr123.nm.ru » 21 ноя 2014, 12:25
avr123.nm.ru » 21 ноя 2014, 12:25
![]() slom » 21 ноя 2014, 15:32
slom » 21 ноя 2014, 15:32
avr123.nm.ru писал(а):и что? код под Ардуино не может быть закрытым. Он должен быть публичным - в этом философия Arduino.
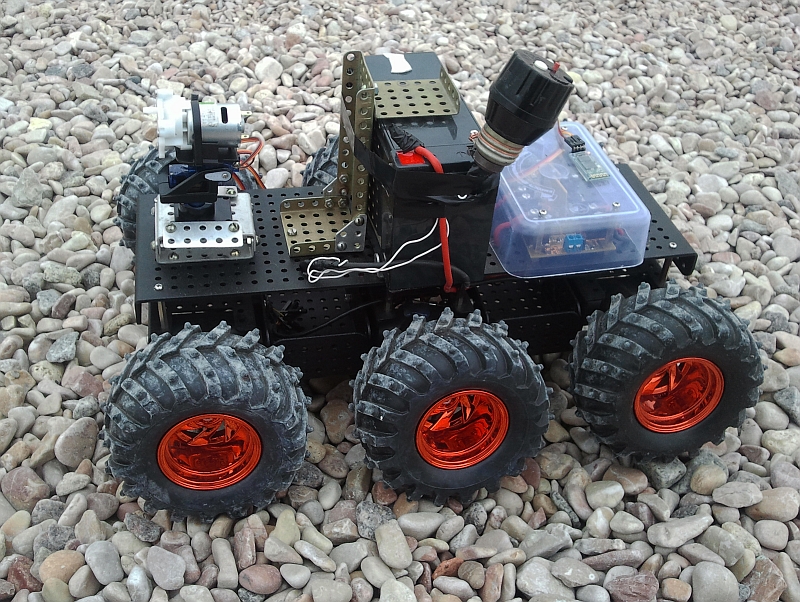
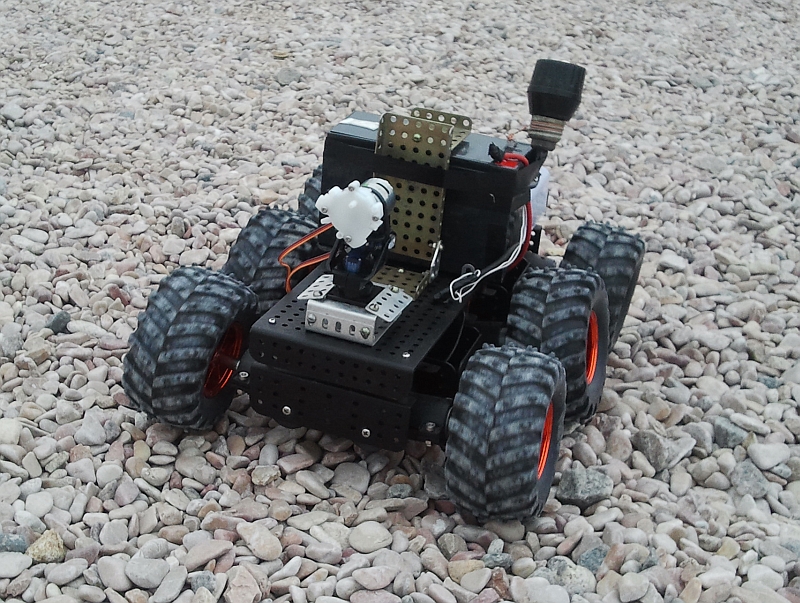
// Скетч для управления через блютус, Wild Thumper 6WD, на ардуино совместимом контролере TREX controller. реализовано движение и стрельба с водомета.
#include <BTCA2ALite.h>// Добавляем библиотеку блютус программы
#include <Servo.h> // Добавляем библиотеку серво
Servo myservoH; // Горизонтальная серва углы от 0 до 180 (центровка 89)
Servo myservoV; // Вертикальная серва углы от 1 до 45
const int H_SERVO_PIN = 7; // Горизонтальная серва подключена к пину 7
const int V_SERVO_PIN = 8; //Пин вертикального сервопривода 8
const float H_L_ANGLE = 180; // Максимальные угл поворота башни налево
const float H_R_ANGLE = 0; // Максимальные угл поворота башни направо
const float H_DEF_ANGLE = 89; // Дефолтный угол (центровка)
const float V_U_ANGLE = 45; // Максимальные угл поворота башни вверх
const float V_D_ANGLE = 1; // Максимальные угл поворота башни вниз
const float V_DEF_ANGLE = 15; // Дефолтный угол (центровка)
//Размер шага V_STEP и H_STEP побираем экспериментально для достижения нужной скорости поворота серв
const float V_STEP = 0.007; // Шаг - знаение отвечающее за скорость вращения по вертикали.
const float H_STEP = 0.012; // Шаг - знаение отвечающее за скорость вращения по горизонтали
float curVAngle = V_DEF_ANGLE; //Переменная текущего угла верт. сервы
float curHAngle = H_DEF_ANGLE; //Переменная текущего угла гор. сервы
bool moveServoVUp = false; //Флаг движения верт. сервы вверх
bool moveServoVDown = false; //Флаг движения верт. сервы вниз
bool moveServoHLeft = false; //Флаг движения гор. сервы влево
bool moveServoHRight = false; //Флаг движения гор. сервы вправо
btca2aLite btca2aLite; // Конструктор btca2aLite
// Задаем скорости для движения
int Speed = 80; // Текущая максимальная скорость
int TSpeed = 150; // Скорость медленного мотора при повороте
int RLSpeed = 200; // Скорость танкоаого разворота
// задаем пины для левого мотора
#define Dir_L 2
#define Pwm_L 3
#define Brake_L 4
// задаем пины для правого мотора
#define Dir_R 10
#define Pwm_R 11
#define Brake_R 9
#define SHOT 12 // пин для водомета
enum States
{
WAITING,
READING,
RUNNING,
ERROR,
TIMEOUT
};
States state;
States onWait();
States onRead();
States onRun();
States onError();
States onTimeout();
void performServo(); // добовляем сервы
void setup(){
Serial.begin(9600); // Скорость BT и порта должна быть 9600
//Моторы
pinMode (Pwm_L, OUTPUT);
pinMode (Dir_L, OUTPUT);
pinMode (Brake_L, OUTPUT);
pinMode (Pwm_R, OUTPUT);
pinMode (Dir_R, OUTPUT);
pinMode (Brake_R, OUTPUT);
digitalWrite (Pwm_L, LOW);
digitalWrite (Pwm_R, LOW);
digitalWrite (Brake_L, LOW);
digitalWrite (Brake_R, LOW);
pinMode(SHOT, OUTPUT); // задаем выход для стрельбы водой
// устанавливаем пин как вывод управления сервой
myservoH.attach(H_SERVO_PIN);
myservoV.attach(V_SERVO_PIN);
myservoH.write(curHAngle);
myservoV.write(curVAngle);
//Светодиод
pinMode(13, OUTPUT); // Инициализируем пин светодиода
digitalWrite(13, HIGH); // Светодиод выключен
}
void loop(){
btca2aLite.ReadCommand(); // Считывание принятых команд (кодов кнопок)
//Вызываем функцию управление сервами
performServo();
//--------— Движение Вперед —-------------
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_UP)) // Едет вперед если нажат курсор ВПЕРЕД
{
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_RIGHT)){ // Поворот направо при нажатии курсора ВПЕРЕД и ВЛЕВО
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, TSpeed);
digitalWrite (Dir_R, HIGH);
analogWrite (Pwm_R, Speed);
}
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_LEFT)){ // Поворот налево при нажатии курсора ВПЕРЕД и ВПРАВО
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, Speed);
digitalWrite (Dir_R, HIGH);
analogWrite (Pwm_R, TSpeed);
}
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, Speed);
digitalWrite (Dir_R, HIGH);
analogWrite (Pwm_R, Speed);
}
//-------— Движение Назад —-------------
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_DOWN)) // Едет назад если нажат курсор НАЗАД
{
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_RIGHT)){ // Поворот налево при нажатии курсора НАЗАД и ВЛЕВО
digitalWrite (Dir_L, LOW);
analogWrite (Pwm_L, TSpeed);
digitalWrite (Dir_R, LOW);
analogWrite (Pwm_R, Speed);
}
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_LEFT)){ // Поворот направо при нажатии курсора НАЗАД и ВПРАВО
digitalWrite (Dir_L, LOW);
analogWrite (Pwm_L, Speed);
digitalWrite (Dir_R, LOW);
analogWrite (Pwm_R, TSpeed);
}
digitalWrite (Dir_L, LOW);
analogWrite (Pwm_L, Speed);
digitalWrite (Dir_R, LOW);
analogWrite (Pwm_R, Speed);
}
//-------— Движение Влево (Танковый разворот) —-------------
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_LEFT )) // Едет вперед если нажат курсор ВПЕРЕД
{
digitalWrite (Dir_L, LOW);
analogWrite (Pwm_L, RLSpeed);
digitalWrite (Dir_R, HIGH);
analogWrite (Pwm_R, RLSpeed);
}
//-------— Движение Вправо (Танковый разворот) —-------------
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_RIGHT)) // Едет вперед если нажат курсор ВПЕРЕД
{
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, RLSpeed);
digitalWrite (Dir_R, LOW);
analogWrite (Pwm_R, RLSpeed);
}
//-------— движение в право —-------------
if (btca2aLite.ButtonPressed(KEYCODE_DPAD_RIGHT)) // Едет вперед если нажат курсор ВПЕРЕД
{
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, RLSpeed);
digitalWrite (Dir_R, LOW);
analogWrite (Pwm_R, RLSpeed);
}
//-------— включение насоса —-------------
if (btca2aLite.ButtonPressed(KEYCODE_BUTTON_SELECT))
{
digitalWrite (SHOT, HIGH);
}
//-------— выключение насоса происходит автоматически после отпускания кнопки—-------------
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_SELECT))
{
digitalWrite (SHOT, LOW);
}
//--------— Повороты серв при нажатии кнопок —-------------
if(btca2aLite.Button(KEYCODE_BUTTON_X)) // servoV вниз
{
moveServoVDown = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_A)) // servoH движется к 0
{
moveServoHRight = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_B)) // servoV вверх
{
moveServoVUp = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_Y)) // servoH движется к 180
{
moveServoHLeft = true;
}
//--------— чтобы сервы не продолжали движения при отжатых кнопках —-------------
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_X))
{
moveServoVDown = false;
}
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_B))
{
moveServoVUp = false;
}
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_A))
{
moveServoHRight = false;
}
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_Y))
{
moveServoHLeft = false;
}
//----------------— Стоп —---------------------
// Если не нажата ни одна кнопка курсора происходит остановка, скорость 0 для каждого мотора
if (btca2aLite.ButtonReleased(KEYCODE_DPAD_UP) && btca2aLite.ButtonReleased(KEYCODE_DPAD_DOWN) && btca2aLite.ButtonReleased(KEYCODE_DPAD_LEFT) && btca2aLite.ButtonReleased(KEYCODE_DPAD_RIGHT)){
analogWrite (Pwm_L, 0);
analogWrite (Pwm_R, 0);
}
}
//Функция управления сервоприводами (вызывается в теле loop на каждой итерации)
//Выполняет изменения положения серв на подобранный шаг согласно установленным флагам движения
//Флаги устанавливаются согласно поступившим символам управления сервами
void performServo()
{
//Установлен флаг движения вверх и текущий угол не максимальный
if (moveServoVUp && curVAngle + V_STEP <= V_U_ANGLE)
{
//К текущему верт. углу прибавляем шаг
curVAngle += V_STEP;
}
//Установлен флаг движения вниз и текущий угол не минимален
else if (moveServoVDown && curVAngle - V_STEP >= V_D_ANGLE)
{
//От текущего верт. угла отнимаем шаг
curVAngle -= V_STEP;
}
//Установлен флаг движения влево и текущий угол не максимален
if (moveServoHLeft && curHAngle + H_STEP <= H_L_ANGLE)
{
//К текущему гор. углу прибавляем гор. шаг
curHAngle += H_STEP;
}
//Установлен флаг движения вправо и текущий угол не минимален
else if (moveServoHRight && curHAngle - H_STEP >= H_R_ANGLE)
{
//От текущего угла отнимаем гор. шаг
curHAngle -= H_STEP;
}
//Если было движние по вертикали
if (moveServoVUp || moveServoVDown)
{
myservoV.write(curVAngle);
}
//Если было движение по горизонтали
if (moveServoHLeft || moveServoHRight)
{
myservoH.write(curHAngle);
}
}![]() avr123.nm.ru » 22 ноя 2014, 17:43
avr123.nm.ru » 22 ноя 2014, 17:43
![]() slom » 08 дек 2014, 11:32
slom » 08 дек 2014, 11:32





![]() elmot » 08 дек 2014, 14:08
elmot » 08 дек 2014, 14:08

![]() Aseris » 08 дек 2014, 17:44
Aseris » 08 дек 2014, 17:44

![]() slom » 08 дек 2014, 21:36
slom » 08 дек 2014, 21:36
elmot писал(а):купить на барахолке или у ремонтников пару битых планшетов или разгроханный ноут и вытащить оттуда акки
Aseris писал(а):Переделывать старт стоп двигателей, копать в сторону разгон торможение, тбо очень дерганое движение, быстро умрут шестерни и щетки двигателя.

Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0