| |
roboforum.ruТехнический форум по робототехнике. |
|
Тележка с манипулятором и брандспойтом
Re: Тележка с манипулятором и брандспойтом
![]() Scorpio » 05 фев 2015, 23:50
Scorpio » 05 фев 2015, 23:50
Ага, нашел дефектик. Качает. Правда громкий он больно.
-

Scorpio - Сообщения: 2702
- Зарегистрирован: 30 сен 2008, 18:49
- Откуда: Где-то в Латинской Америке
Re: Тележка с манипулятором и брандспойтом
![]() slom » 06 фев 2015, 11:04
slom » 06 фев 2015, 11:04
у меня был прикол с помпой что включал работала, полежала месяц перестала работать, просто раскрутил и снова скрутил - работает.
и жрет она тока вроде как более 3х ампер. по крайней мере ключ на 2а дымок пускал решил проблему поставив на нее отдельное питание от 8 пальчиковых батареек. струя бьет метра на 3, мне хватает. от 12в мощного акума лупило метров на 5-6
решил проблему поставив на нее отдельное питание от 8 пальчиковых батареек. струя бьет метра на 3, мне хватает. от 12в мощного акума лупило метров на 5-6
и жрет она тока вроде как более 3х ампер. по крайней мере ключ на 2а дымок пускал
решил проблему поставив на нее отдельное питание от 8 пальчиковых батареек. струя бьет метра на 3, мне хватает. от 12в мощного акума лупило метров на 5-6-

slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Тележка с манипулятором и брандспойтом
![]() slom » 07 фев 2015, 10:29
slom » 07 фев 2015, 10:29
нашел интересный эмулятор ардуино
собрал такую схемку. по примеру.
http://123d.circuits.io/circuits/573506-the-unnamed-circuit/edit#breadboard
интересно у всех работает?
если да то берите на вооружение, думаю это проще чем постоянно по мелочам шить плату...
собрал такую схемку. по примеру.
http://123d.circuits.io/circuits/573506-the-unnamed-circuit/edit#breadboard
интересно у всех работает?
если да то берите на вооружение, думаю это проще чем постоянно по мелочам шить плату...
-
slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Тележка с манипулятором и брандспойтом
![]() slom » 05 мар 2015, 21:25
slom » 05 мар 2015, 21:25
решил что робот должен обладать хоть немного автоматизмом.
и как раз была у меня одна незадействованая кнопка, сделал на нее функцию автоматического захвата предметов
при нажатии машина делает "шаг" вперед, хватает и поднимает предмет, если нажать кнопку много раз то столько "шагов" она и сделает...
и как раз была у меня одна незадействованая кнопка, сделал на нее функцию автоматического захвата предметов
при нажатии машина делает "шаг" вперед, хватает и поднимает предмет, если нажать кнопку много раз то столько "шагов" она и сделает...
-
slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Тележка с манипулятором и брандспойтом
![]() slom » 12 мар 2015, 23:07
slom » 12 мар 2015, 23:07
увидел в инете интересное видео:
и ему подобные, задался вопросом как это сделано, что для этого нужно добавить к уже существующей телеге?
и ему подобные, задался вопросом как это сделано, что для этого нужно добавить к уже существующей телеге?
-
slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Тележка с манипулятором и брандспойтом
![]() slom » 26 мар 2015, 17:02
slom » 26 мар 2015, 17:02
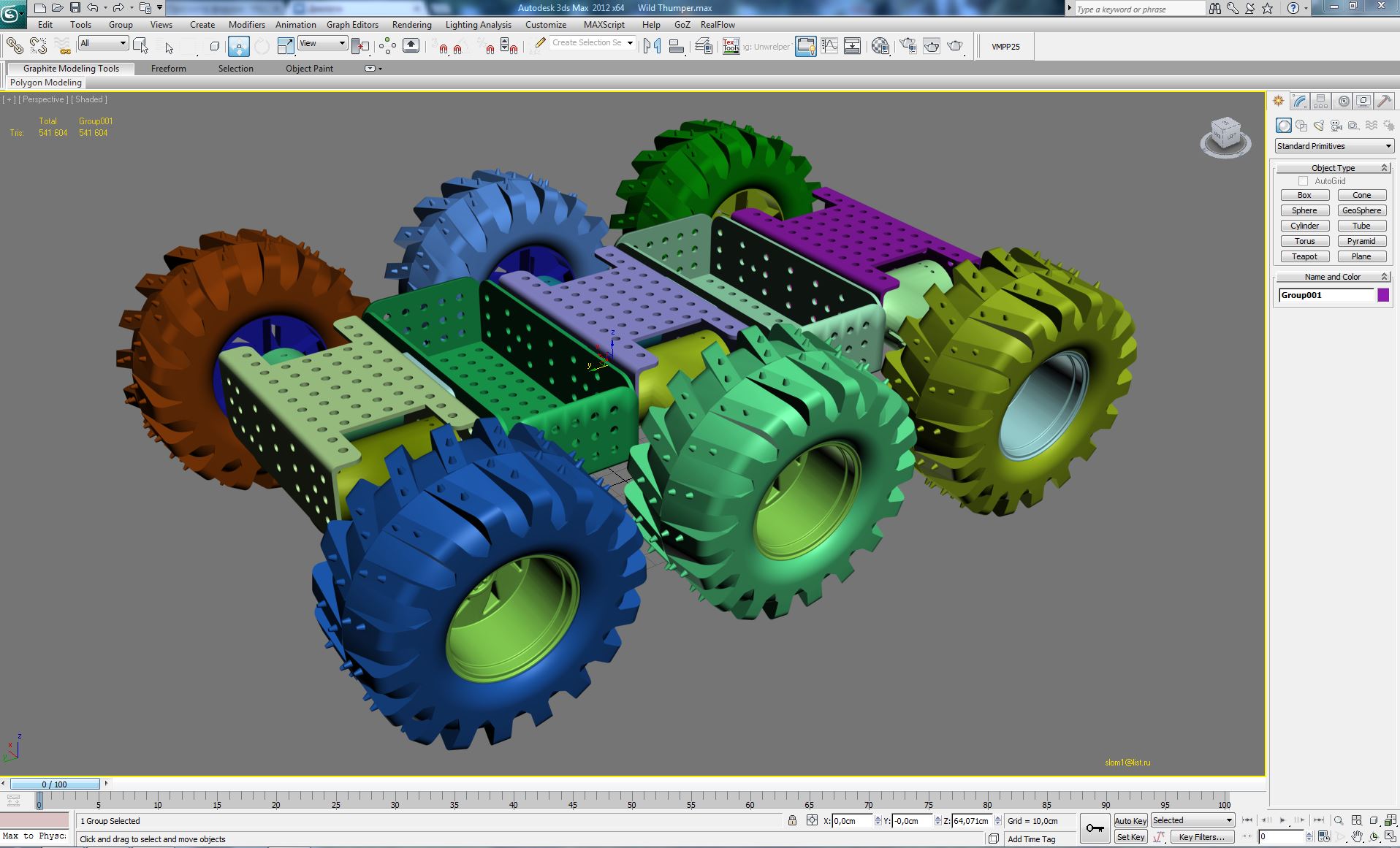
Решил в 3д заняться моделированием корпуса.
скачал с инета вот такую 3д модель, буду облагораживать
Добавлено спустя 2 часа 3 минуты 18 секунд:
бороздим просторы грядок....
скачал с инета вот такую 3д модель, буду облагораживать
Добавлено спустя 2 часа 3 минуты 18 секунд:
бороздим просторы грядок....
-
slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Тележка с манипулятором и брандспойтом
![]() slom » 04 апр 2015, 09:33
slom » 04 апр 2015, 09:33
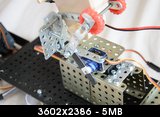
Наконец то нашел время прикрутить приехавшую из Китая пушку...
правда это была не совсем пушка, а механизм стрельбы 6мм шариками от модельных танком Henlong, чтобы не покупать целый танк за 3000-5000 я купил запасть за 550руб.
почему я не купил гирбокс от страйкбола?
на то 2 причины:
1. сильно мощное, может кого то покалечить..
2. цена в 10 раз выше
правда есть недостаток у этого механизма - низкая скорострельность, на видео особенно низкая т.к питаю от 3х в, хотя можно 6 - 9



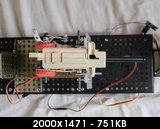
ствол и уплотнительная резинка в комплект механизма не входят!
поэтому чтобы стрелять пришлось купить детский пистолет и позаимствовать у него ствол и резинку.

вот что получилось:
п.с. к сожалению на моей плате не хватает пинов для подключения всего необходимого...
пришлось временно убрать водомет.
у меня есть еще одна плата ардуино, хочу соединить их вместе, но уарт у меня уже занят, если ктото знает другие способы и может мне помочь, буду благодарен
правда это была не совсем пушка, а механизм стрельбы 6мм шариками от модельных танком Henlong, чтобы не покупать целый танк за 3000-5000 я купил запасть за 550руб.
почему я не купил гирбокс от страйкбола?
на то 2 причины:
1. сильно мощное, может кого то покалечить..
2. цена в 10 раз выше
правда есть недостаток у этого механизма - низкая скорострельность, на видео особенно низкая т.к питаю от 3х в, хотя можно 6 - 9





ствол и уплотнительная резинка в комплект механизма не входят!
поэтому чтобы стрелять пришлось купить детский пистолет и позаимствовать у него ствол и резинку.

вот что получилось:
п.с. к сожалению на моей плате не хватает пинов для подключения всего необходимого...
пришлось временно убрать водомет.
у меня есть еще одна плата ардуино, хочу соединить их вместе, но уарт у меня уже занят, если ктото знает другие способы и может мне помочь, буду благодарен
-
slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Тележка с манипулятором и брандспойтом
![]() slom » 02 май 2015, 17:56
slom » 02 май 2015, 17:56
Выражаю особую благодарность Dmitry__ за помощь в моем проекте!
Дмитрий разобрался что к чему, и помог с кодом для работы моторов и серв через I2C интерфейс с управлением от блютус джойстика PS2
выкладываю скетчи, может кому то пригодиться.
за основу взят скетч для контролера ТИРЕКС
скачать можно:
https://www.sparkfun.com/products/12075
этот скетч заливается как есть в управляемую ардуину, в моем случае это и есть контролер ТИРЕКС.
к этой плате присоединяем двигатели(х2) и сервы(х2)
соединяем через I2C интерфейс со 2й платой ардуино.(в моем случае нано.) Ардуино нано соединяем с блютус модулем от геймпада.
и заливаем скетч:
важный момент, при соеденении по И2С шине, на плате тирекс нужно на один из пинов и2с разьема подавать +5в для активации этого соединения, если питание не подать, ничего работать не будет!
после включения тирекса через сек 10 происходит бип моторам - тирекс готов. после этого можно включать нану, и сразу жать ресет, не знаю почему, если ресет не нажать то соединение не устанавливается.
Дмитрий разобрался что к чему, и помог с кодом для работы моторов и серв через I2C интерфейс с управлением от блютус джойстика PS2
выкладываю скетчи, может кому то пригодиться.
за основу взят скетч для контролера ТИРЕКС
скачать можно:
https://www.sparkfun.com/products/12075
этот скетч заливается как есть в управляемую ардуину, в моем случае это и есть контролер ТИРЕКС.
к этой плате присоединяем двигатели(х2) и сервы(х2)
соединяем через I2C интерфейс со 2й платой ардуино.(в моем случае нано.) Ардуино нано соединяем с блютус модулем от геймпада.
и заливаем скетч:
- Код: Выделить всё • Развернуть
#include <PS2X_lib.h> //for v1.6 библиотека джойстика
#include <Wire.h>
#include <Servo.h>
Servo RXservo; //подключаем сервы
Servo RYservo;
#define ledPin 13
#define startbyte 0x0F
#define I2Caddress 0x07
int sv[6]={1000,1400,1500,1500,0,0}; //заданны позиции серво приводов, на тирексе их 6 штук, из них первые две отключены, им соответствуют значения = 0, на плате это 5 и 6 пины. далее 1000 = 7 пин, 1400 = 8 пин... // servo positions: 0 = Not Used
int sd[6]={5,10,-5,-15,20,-20}; // servo sweep speed/direction
int lmspeed,rmspeed; // left and right motor speed from -255 to +255 (negative value = reverse)
int ldir=5; // how much to change left motor speed each loop (use for motor testing)
int rdir=5; // how much to change right motor speed each loop (use for motor testing)
byte lmbrake,rmbrake; // left and right motor brake (non zero value = brake)
byte devibrate=50; // time delay after impact to prevent false re-triggering due to chassis vibration
int sensitivity=50; // threshold of acceleration / deceleration required to register as an impact
int lowbat=550; // adjust to suit your battery: 550 = 5.50V
byte i2caddr=7; // default I2C address of T'REX is 7. If this is changed, the T'REX will automatically store new address in EEPROM
byte i2cfreq=0; // I2C clock frequency. Default is 0=100kHz. Set to 1 for 400kHz
/******************************************************************
* set pins connected to PS2 controller:
* - 1e column: original
* - 2e colmun: Stef?
* replace pin numbers by the ones you use
//подключение пинов блютус модуля геймпада:
******************************************************************/
#define PS2_DAT 12 //14
#define PS2_CMD 11 //15
#define PS2_SEL 10 //16
#define PS2_CLK 9 //17
/******************************************************************
* select modes of PS2 controller:
* - pressures = analog reading of push-butttons
* - rumble = motor rumbling
* uncomment 1 of the lines for each mode selection
******************************************************************/
//#define pressures true
#define pressures false
//#define rumble true
#define rumble false
PS2X ps2x; // create PS2 Controller Class
int PS2 = 0;
//right now, the library does NOT support hot pluggable controllers, meaning
//you must always either restart your Arduino after you connect the controller,
//or call config_gamepad(pins) again after connecting the controller.
int error = 0;
byte type = 0;
byte vibrate = 0;
void setup(){
//пины серв
RXservo.attach(3);
RYservo.attach(4);
Serial.begin(57600);
pinMode(ledPin, OUTPUT);
Wire.begin(); // no address - join the bus as master
delay(300); //added delay to give wireless ps2 module some time to startup, before configuring it
//CHANGES for v1.6 HERE!!! **************PAY ATTENTION*************
//setup pins and settings: GamePad(clock, command, attention, data, Pressures?, Rumble?) check for error
error = ps2x.config_gamepad(PS2_CLK, PS2_CMD, PS2_SEL, PS2_DAT, pressures, rumble);
if(error == 0){
Serial.print("Found Controller, configured successful ");
Serial.print("pressures = ");
if (pressures)
Serial.println("true ");
else
Serial.println("false");
Serial.print("rumble = ");
if (rumble)
Serial.println("true)");
else
Serial.println("false");
}
else
Serial.println("Большой еггог :)");
// Serial.print(ps2x.Analog(1), HEX);
type = ps2x.readType();
switch(type) {
case 0:
Serial.print("Unknown Controller type found ");
break;
case 1:
Serial.print("DualShock Controller found ");
break;
case 2:
Serial.print("GuitarHero Controller found ");
break;
case 3:
Serial.print("Wireless Sony DualShock Controller found ");
break;
}
}
void loop() {
/* You must Read Gamepad to get new values and set vibration values
ps2x.read_gamepad(small motor on/off, larger motor strenght from 0-255)
if you don't enable the rumble, use ps2x.read_gamepad(); with no values
You should call this at least once a second
*/
if(error == 1) //skip loop if no controller found
return;
if(type == 2){ //Guitar Hero Controller
ps2x.read_gamepad(); //read controller
if(ps2x.ButtonPressed(GREEN_FRET))
Serial.println("Green Fret Pressed");
if(ps2x.ButtonPressed(RED_FRET))
Serial.println("Red Fret Pressed");
if(ps2x.ButtonPressed(YELLOW_FRET))
Serial.println("Yellow Fret Pressed");
if(ps2x.ButtonPressed(BLUE_FRET))
Serial.println("Blue Fret Pressed");
if(ps2x.ButtonPressed(ORANGE_FRET))
Serial.println("Orange Fret Pressed");
if(ps2x.ButtonPressed(STAR_POWER))
Serial.println("Star Power Command");
if(ps2x.Button(UP_STRUM)) //will be TRUE as long as button is pressed
Serial.println("Up Strum");
if(ps2x.Button(DOWN_STRUM))
Serial.println("DOWN Strum");
if(ps2x.Button(PSB_START)) //will be TRUE as long as button is pressed
Serial.println("Start is being held");
if(ps2x.Button(PSB_SELECT))
Serial.println("Select is being held");
if(ps2x.Button(ORANGE_FRET)) { // print stick value IF TRUE
Serial.print("Wammy Bar Position:");
Serial.println(ps2x.Analog(WHAMMY_BAR), DEC);
}
}
else { //DualShock Controller
ps2x.read_gamepad(false, vibrate); //read controller and set large motor to spin at 'vibrate' speed
if(ps2x.Button(PSB_START)) //will be TRUE as long as button is pressed
Serial.println("Start is being held");
if(ps2x.Button(PSB_SELECT))
Serial.println("Select is being held");
if(ps2x.Button(PSB_PAD_UP)) { //will be TRUE as long as button is pressed
Serial.print("Up held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_UP), DEC);
}
if(ps2x.Button(PSB_PAD_RIGHT)){
Serial.print("Right held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_RIGHT), DEC);
}
if(ps2x.Button(PSB_PAD_LEFT)){
Serial.print("LEFT held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_LEFT), DEC);
}
if(ps2x.Button(PSB_PAD_DOWN)){
Serial.print("DOWN held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_DOWN), DEC);
}
vibrate = ps2x.Analog(PSAB_CROSS); //this will set the large motor vibrate speed based on how hard you press the blue (X) button
if (ps2x.NewButtonState()) { //will be TRUE if any button changes state (on to off, or off to on)
if(ps2x.Button(PSB_L3))
Serial.println("L3 pressed");
if(ps2x.Button(PSB_R3))
Serial.println("R3 pressed");
if(ps2x.Button(PSB_L2))
Serial.println("L2 pressed");
if(ps2x.Button(PSB_R2))
Serial.println("R2 pressed");
if(ps2x.Button(PSB_TRIANGLE))
Serial.println("Triangle pressed");
}
if(ps2x.ButtonPressed(PSB_CIRCLE)) //will be TRUE if button was JUST pressed
Serial.println("Circle just pressed");
if(ps2x.NewButtonState(PSB_CROSS)) //will be TRUE if button was JUST pressed OR released
Serial.println("X just changed");
if(ps2x.ButtonReleased(PSB_SQUARE)) //will be TRUE if button was JUST released
Serial.println("Square just released");
Serial.print("Stick:");
//управление моторам через левый стик геймпада
lmspeed = -(ps2x.Analog(PSS_LY)-128); //скопировать данные джойстика в регистры правого и левого двигателя
int tmp = -(ps2x.Analog(PSS_LX)-128); //
rmspeed = lmspeed;
lmspeed -= tmp; lmspeed *=2;
rmspeed += tmp; rmspeed *=2;
if (lmspeed>255) lmspeed =255; //ограничить макс. значения моторов
if (rmspeed>255) rmspeed =255; //
if (lmspeed<-255) lmspeed =-255; //
if (rmspeed<-255) rmspeed =-255; //
lmbrake =0; //выкл. стоп
rmbrake =0; //
//управление сервами через правый стик геймпада, реализовано 2мя разными методами, результат примерно одинаковый:
sv[0] = (map(ps2x.Analog(PSS_RY), 0, 255, 1000, 2000)); ;
sv[1] = 1500 -(ps2x.Analog(PSS_RX)-128)*2;
//
Serial.print(lmspeed, DEC); //Left stick, Y axis. Other options: LX, RY, RX
Serial.print(",");
Serial.print(rmspeed, DEC);
Serial.print(",");
RXservo.write(map(ps2x.Analog(PSS_RX), 255, 0, 0, 180)); ;
delay(50);
ps2x.read_gamepad(false, 0);
RYservo.write(map(ps2x.Analog(PSS_RY), 0, 255, 0, 90)); ;
delay(50);
ps2x.read_gamepad(false, 0);
// Serial.print(ps2x.Analog(PSS_RY), DEC);
// Serial.print(",");
// Serial.print(ps2x.Analog(PSS_RX), DEC);
// Serial.println("\t");
}
digitalWrite(ledPin, HIGH);
MasterSend(startbyte,2,lmspeed,lmbrake,rmspeed,rmbrake,sv[0],sv[1],sv[2],sv[3],sv[4],sv[5],devibrate,sensitivity,lowbat,i2caddr,i2cfreq);
delay(20);
MasterReceive(); // receive data packet from T'REX controller
}
void MasterSend(byte sbyte, byte pfreq, int lspeed, byte lbrake, int rspeed, byte rbrake, int sv0, int sv1, int sv2, int sv3, int sv4, int sv5, byte dev,int sens,int lowbat, byte i2caddr,byte i2cfreq)
{
Wire.beginTransmission(I2Caddress); // transmit data to 7
Wire.write(startbyte); // start byte
Wire.write(pfreq); // pwm frequency
Wire.write(highByte(lspeed)); // MSB left motor speed
Wire.write( lowByte(lspeed)); // LSB left motor speed
Wire.write(lbrake); // left motor brake
Wire.write(highByte(rspeed)); // MSB right motor speed
Wire.write( lowByte(rspeed)); // LSB right motor speed
Wire.write(rbrake); // right motor brake
Wire.write(highByte(sv0)); // MSB servo 0
Wire.write( lowByte(sv0)); // LSB servo 0
Wire.write(highByte(sv1)); // MSB servo 1
Wire.write( lowByte(sv1)); // LSB servo 1
Wire.write(highByte(sv2)); // MSB servo 2
Wire.write( lowByte(sv2)); // LSB servo 2
Wire.write(highByte(sv3)); // MSB servo 3
Wire.write( lowByte(sv3)); // LSB servo 3
Wire.write(highByte(sv4)); // MSB servo 4
Wire.write( lowByte(sv4)); // LSB servo 4
Wire.write(highByte(sv5)); // MSB servo 5
Wire.write( lowByte(sv5)); // LSB servo 5
Wire.write(dev); // devibrate
Wire.write(highByte(sens)); // MSB impact sensitivity
Wire.write( lowByte(sens)); // LSB impact sensitivity
Wire.write(highByte(lowbat)); // MSB low battery voltage 550 to 30000 = 5.5V to 30V
Wire.write( lowByte(lowbat)); // LSB low battery voltage
Wire.write(i2caddr); // I2C slave address for T'REX controller
Wire.write(i2cfreq); // I2C clock frequency: 0=100kHz 1=400kHz
Wire.endTransmission(); // stop transmitting
//Serial.println("Master Command Data Packet Sent");
//-------------------------------- Make sure Master and Slave I2C clock the same ------------------------------------------------
if(i2cfreq==0) // thanks to Nick Gammon: http://gammon.com.au/i2c
{
TWBR=72; // default I²C clock is 100kHz
}
else
{
TWBR=12; // changes the I²C clock to 400kHz
}
}
void MasterReceive()
{//================================================================= Error Checking ==========================================================
byte d;
int i=0;
Wire.requestFrom(I2Caddress,24); // request 24 bytes from device 007
while(Wire.available()<24) // wait for entire data packet to be received
{
if(i==0) Serial.print("Waiting for slave to send data."); // Only print message once (i==0)
if(i>0) Serial.print("."); // print a dot for every loop where buffer<24 bytes
i++; // increment i so that message only prints once.
if(i>79)
{
Serial.println("");
i=1;
}
}
d=Wire.read(); // read start byte from buffer
if(d!=startbyte) // if start byte not equal to 0x0F
{
Serial.print(d,DEC);
while(Wire.available()>0) // empty buffer of bad data
{
d=Wire.read();
}
Serial.println(" Wrong Start Byte"); // error message
return; // quit
}
//================================================================ Read Data ==============================================================
//Serial.print(". Trex Err:"); // slave error report
Serial.print(Wire.read(),DEC);
i=Wire.read()*256+Wire.read(); // T'REX battery voltage
Serial.print(" Akk:");
Serial.print(int(i/10));Serial.print(".");
Serial.print(i-(int(i/10)*10));Serial.print("V");
i=Wire.read()*256+Wire.read();
Serial.print("\tL Curr:");
Serial.print(i);Serial.print("mA"); // T'REX left motor current in mA
i=Wire.read()*256+Wire.read();
Serial.print(" Enc:");
Serial.print(i); // T'REX left motor encoder count
i=Wire.read()*256+Wire.read();
Serial.print("\tR Curr:");
Serial.print(i);Serial.print("mA"); // T'REX right motor current in mA
i=Wire.read()*256+Wire.read();
Serial.print(" Enc:");
Serial.print(i); // T'REX right motor encoder count
i=Wire.read()*256+Wire.read();
Serial.print(" X-axis:");
Serial.print(i); // T'REX X-axis
i=Wire.read()*256+Wire.read();
Serial.print(" Y:");
Serial.print(i); // T'REX Y-axis
i=Wire.read()*256+Wire.read();
Serial.print(" Z:");
Serial.print(i); // T'REX Z-axis
i=Wire.read()*256+Wire.read();
Serial.print(" X-delta:");
Serial.print(i); // T'REX X-delta
i=Wire.read()*256+Wire.read();
Serial.print(" Y:");
Serial.print(i); // T'REX Y-delta
i=Wire.read()*256+Wire.read();
Serial.print(" Z:");
Serial.println(i); // T'REX Z-delta
}
важный момент, при соеденении по И2С шине, на плате тирекс нужно на один из пинов и2с разьема подавать +5в для активации этого соединения, если питание не подать, ничего работать не будет!
после включения тирекса через сек 10 происходит бип моторам - тирекс готов. после этого можно включать нану, и сразу жать ресет, не знаю почему, если ресет не нажать то соединение не устанавливается.
-
slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Тележка с манипулятором и брандспойтом
![]() avr123.nm.ru » 08 май 2015, 11:46
avr123.nm.ru » 08 май 2015, 11:46
вы бы архивом приложили С БИБЛИОТЕКАМИ!!!
боюсь погибнут они от пиковых токов. купите липольку для моделей на большой ток разряда. от 25С и выше.slom писал(а):Поскольку у меня сейчас питание от ли-ион батарей из ноутбука.
-

avr123.nm.ru - отсылающий читать курс
- Сообщения: 14195
- Зарегистрирован: 06 ноя 2005, 04:18
- Откуда: Москва
- Предупреждения: -8
Re: Тележка с манипулятором и брандспойтом
![]() slom » 08 май 2015, 15:09
slom » 08 май 2015, 15:09
так библиотеки все есть в интернете. но хорошо, после праздников будет время доделаю что хотел по управлению с джойстика и выложу все в куче.
насчет акумов то поидее если 3 банке в паралень ставить то и емкость и ток отдачи хороший выходит? насчет модельного, то это проблематично, их нужно заказывать, к ним нужна хорошая дорогая зарядка а я купил 30 банок за 300руб
насчет акумов то поидее если 3 банке в паралень ставить то и емкость и ток отдачи хороший выходит? насчет модельного, то это проблематично, их нужно заказывать, к ним нужна хорошая дорогая зарядка а я купил 30 банок за 300руб
-
slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Тележка с манипулятором и брандспойтом
![]() robovan » 11 июн 2015, 10:14
robovan » 11 июн 2015, 10:14
можете сделать дрон для страйкбола. Думаю людям понравится:)
-

robovan - Сообщения: 1536
- Зарегистрирован: 04 сен 2012, 00:39
- Откуда: Украина
- ФИО: Владимир
Re: Тележка с манипулятором и брандспойтом
![]() slom » 11 июн 2015, 14:54
slom » 11 июн 2015, 14:54
robovan писал(а):можете сделать дрон для страйкбола. Думаю людям понравится:)
если займусь страйкболом то обязательно сделаю!
но пока нет ни желания не времени...
да и для детей такой вариант более безопасен.
п.с. и с этим проблемы. не могу никак победить кнопки на джойстике. чтоб при нажатии на кнопки моторы и сервы крутило. на стики работает на кнопки не хочет (
-
slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Тележка с манипулятором и брандспойтом
![]() Petr Kiselev » 12 июн 2015, 22:25
Petr Kiselev » 12 июн 2015, 22:25
slom, если еще не решил проблему с нехваткой пинов, то может пригодится из моего опыта. Я просто использую две Ардуины, программируя их как мне надо по отдельности, а в работу их запускаю вместе, подавая на каждую питание одновременно. 
Можно, конечно, применить множитель пинов. Есть такой шилд.
Можно, конечно, применить множитель пинов. Есть такой шилд.
- Petr Kiselev
- Сообщения: 279
- Зарегистрирован: 12 июн 2010, 15:34
Re: Тележка с манипулятором и брандспойтом
![]() slom » 12 июн 2015, 23:48
slom » 12 июн 2015, 23:48
Petr Kiselev писал(а):slom, если еще не решил проблему с нехваткой пинов, то может пригодится из моего опыта. Я просто использую две Ардуины, программируя их как мне надо по отдельности, а в работу их запускаю вместе, подавая на каждую питание одновременно.
Можно, конечно, применить множитель пинов. Есть такой шилд.
Petr Kiselev
а можно подробней как вы между ним взаимосвязь держите?
например если ц меня 1 пульт управления, у него 1 блютус модуль... не могу же я запараллелить его выходы на 2 разные ардуины? или могу? если да, то ардуины получая одинаковые получая одинаковые команды будут поразному на них реагировать, кто на что запрограммирован?
-
slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Тележка с манипулятором и брандспойтом
![]() Petr Kiselev » 13 июн 2015, 17:11
Petr Kiselev » 13 июн 2015, 17:11
Я брал две Pro mini и составлял программы управления бортами, а к одной плате подключал УЗ сенсор. На вторую плату еще цеплял всякую светодиодную иллюминацию (фары, подфарники, мигалки). Мой студент Малахов Иван делал радиоуправление и ШИМ. Три скорости получал. Есть у меня две платы блютуса, но запустить их не удалось.
- Petr Kiselev
- Сообщения: 279
- Зарегистрирован: 12 июн 2010, 15:34
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0