
roboforum.ru
Технический форум по робототехнике.
Тележка с манипулятором и брандспойтом
Re: Тележка с манипулятором и брандспойтом
slom, терминатор, музыка.... Мы все умрем?
Re: Тележка с манипулятором и брандспойтом
Dmitry__ писал(а):slom, терминатор, музыка.... Мы все умрем?
не все!
некоторые останутся рабами для обслуживания багов ардуины

Re: Тележка с манипулятором и брандспойтом
Поскольку у меня сейчас питание от ли-ион батарей из ноутбука.
6 банок(по 3 в параллель) = примерно 7,4 в
страшно ли проседание напруги в пиковые моменты? например когда забуксовал, и тд...
про ли ион пишут что нельзя разряжать наже 2,5в но ведь это не разряд а временная посадка?
м как лучше обезопасить их от именно разряда, момента когда оно реально сядут...
в моей плате, как я понял, есть реализация замера напряжения.
в скетче даже есть такие функции, но родной скетч я не использую, как мне из него вытянуть это дело в свой?
надергал упоминания о лов бат, из разных кусков скетча, он дело в том что разделен на 13 отдельных файлов
6 банок(по 3 в параллель) = примерно 7,4 в
страшно ли проседание напруги в пиковые моменты? например когда забуксовал, и тд...
про ли ион пишут что нельзя разряжать наже 2,5в но ведь это не разряд а временная посадка?
м как лучше обезопасить их от именно разряда, момента когда оно реально сядут...
в моей плате, как я понял, есть реализация замера напряжения.
в скетче даже есть такие функции, но родной скетч я не использую, как мне из него вытянуть это дело в свой?
- Код: Выделить всё • Развернуть
int volts; // battery voltage*10 (accurate to 1 decimal place)
int lowbat=550; // default low battery voltage is 5.5V
- Код: Выделить всё • Развернуть
void Shutdown()
{
//================ Shutdown motors and servos when battery is flat ==============
lmspeed=0; // set left motor speed to 0 (off)
rmspeed=0; // set right motor speed to 0 (off)
Motors(); // update H bridges
servopos[0]=0; // ensure servo 0 is detached
servopos[1]=0; // ensure servo 1 is detached
servopos[2]=0; // ensure servo 2 is detached
servopos[3]=0; // ensure servo 3 is detached
servopos[4]=0; // ensure servo 4 is detached
servopos[5]=0; // ensure servo 5 is detached
Servos(); // update servo pins
}
- Код: Выделить всё • Развернуть
//----------------------------------------------------- Shutdown mode ----------------------------------------------------------------
if (mode==3) // if battery voltage too low
{
Shutdown(); // Shutdown motors and servos
return;
}
надергал упоминания о лов бат, из разных кусков скетча, он дело в том что разделен на 13 отдельных файлов
- Код: Выделить всё • Развернуть
}
i=Wire.read()*256+Wire.read(); // read integer from I²C buffer
if(i>549 && i<3001)
{
lowbat=i; // set low battery value (values higher than battery voltage will force a shutdown)
}
else
{
errorflag = errorflag | 32; // incorrect lowbat given
}
b=Wire.read(); // read byte from buffer
if(b<128)
{
I2Caddress=b; // change I²C address
EEPROM.write(1,b); // update EEPROM with new I²C address
}
else
{
errorflag = errorflag | 64; // incorrect I²C address given
}
Re: Тележка с манипулятором и брандспойтом
Эхх что то форум мертвый!



Re: Тележка с манипулятором и брандспойтом
это не так
Re: Тележка с манипулятором и брандспойтом
а как?
все в спячки... новых проектов нет, старые никто не коментит...
все в спячки... новых проектов нет, старые никто не коментит...
Re: Тележка с манипулятором и брандспойтом
а что это у тебя там за шприцы?
Re: Тележка с манипулятором и брандспойтом
в них акумы
Re: Тележка с манипулятором и брандспойтом
все верно в них банки от разкуроченого ноутбучного акума.
всего 6 банок. по 3 в параллель, 2 последовательно.
всего 6 банок. по 3 в параллель, 2 последовательно.
Re: Тележка с манипулятором и брандспойтом
просто не смог найти 3 контейнера под эти элементы, только 1 купил, и тот оказался очень жалким, провода тонкие как волосины, хотел припаять новые нормальные, а там и припаивать не к чему, жалкая конструкция, а стоила 160 руб!
афигеть цены... чтоб 2 акума последовательно поставить...
и тут случайно попался под руку 20куб шприц, акумы в него идально входят, снизу 1 провод, сверху другой, поршнем прижал и дело вшляпе шприце 
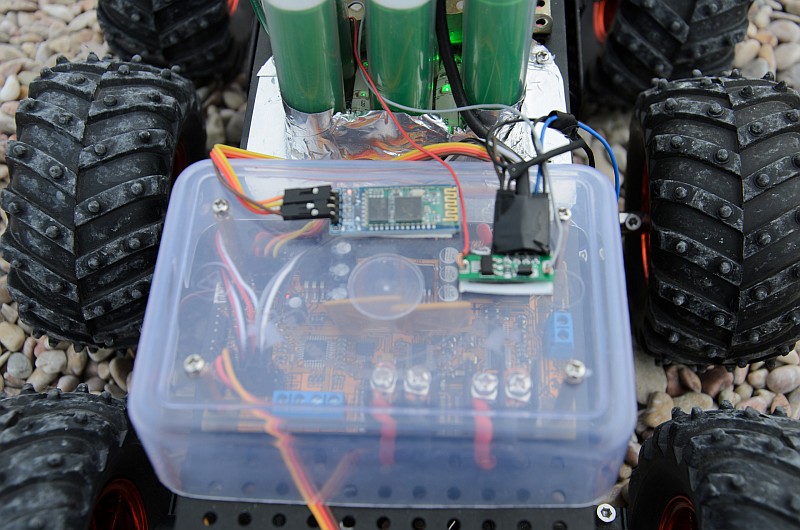
вот тут их лучше видно.
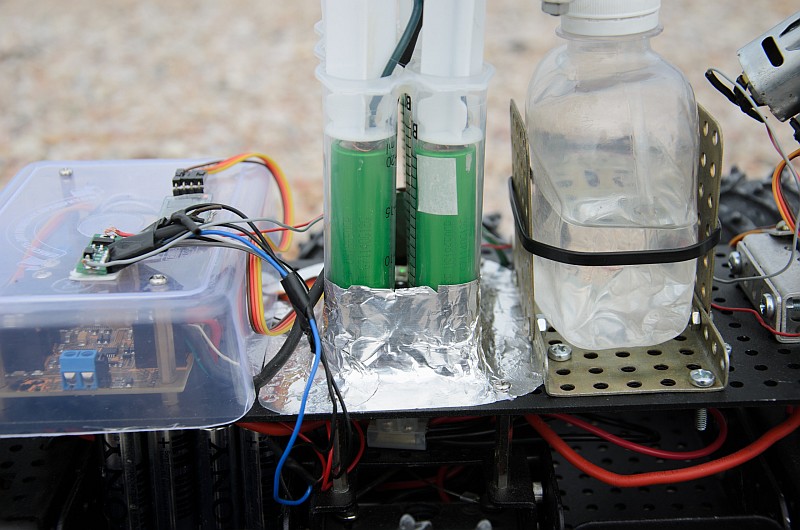
между шприцов забабахал подсветку
ну и куда же без кнопки - предохранителя, вместо старой круглой поставил современный пакетник на 16А
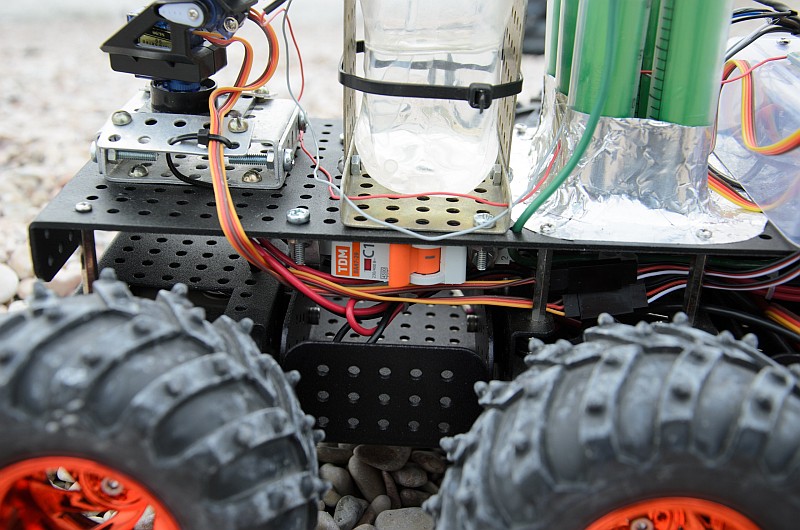
уменьшив вес, сняв 3кг свинца, и отремонтировав 2 колеса, включил полный привод. машина стала лучше ездить
теперь такая галька

телеге не почем...
а вот раньше по ней плохо ходила, вязли колеса. теперь даже по крутым насыпям поднимается.
афигеть цены... чтоб 2 акума последовательно поставить...
и тут случайно попался под руку 20куб шприц, акумы в него идально входят, снизу 1 провод, сверху другой, поршнем прижал и дело в
вот тут их лучше видно.
между шприцов забабахал подсветку
ну и куда же без кнопки - предохранителя, вместо старой круглой поставил современный пакетник на 16А
уменьшив вес, сняв 3кг свинца, и отремонтировав 2 колеса, включил полный привод. машина стала лучше ездить
теперь такая галька
телеге не почем...
а вот раньше по ней плохо ходила, вязли колеса. теперь даже по крутым насыпям поднимается.

Re: Тележка с манипулятором и брандспойтом
slom писал(а): акумы в него идально входят, снизу 1 провод, сверху другой, поршнем прижал
Патентовать надо однако...
Re: Тележка с манипулятором и брандспойтом
У меня, кстати, валяется такой-же шестеренчатый насосик. Заставить качать воду мне его так и не удалось. Шестеренки в порядке, все вроде крутится, уплотнение нормальное. Ан не качает. Я уж и полярность менял и вход с выходом. Глухо. В чем его секрет?
Re: Тележка с манипулятором и брандспойтом
коряво скопировали или брак. ну как вариант проверить, не забилось ли, хотя врядли.