Всем привет!
Ну вот и я решил что-нить сваять из роботов, да еще и чтоб полезный был. Решил сделать мобильного робота с камерой чтоб за квартирой следить когда меня дома нет.
Итак приступим.
1 Часть- технология связи.
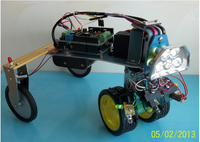
Раз в квартире есть WiFi решил им и воспользоваться. Купил TL-MR3020, залил прошивку OR-WRT, настроил ser2net, поставил его в автозапуск. Пришлось установить пакет драйвер для ACM0, т.к. я использовал самопаяный переходник USB-UART на avr cdc проект здесь
http://www.recursion.jp/avrcdc/. Выглядит это примерно так
Вложение:
 20131031_205748.jpg [ 1.77 МиБ | Просмотров: 7250 ]
20131031_205748.jpg [ 1.77 МиБ | Просмотров: 7250 ]
Между роутером и переходником пришлось поставить usb hub иначе переходник в системе не определялся(вроде как известный баг).
В итоге мы имеем роутер с проброшенным последовательным портом. Связь налажена

2. Платформа
В идеале хотелось иметь гусеничную платформу большую и качественную за вменяемые деньги, но к сожалению найти не удалось. Поэтому заказал мотор-колеса 6 шт на ебее
Вложение:
Комментарий к файлу: колесо
 20131031_205725.jpg [ 2.85 МиБ | Просмотров: 7242 ]
20131031_205725.jpg [ 2.85 МиБ | Просмотров: 7242 ]
. Купил в Крепыже пластину 30*10 см
Вложение:
Комментарий к файлу: пластина
 20131031_205703.jpg [ 2.81 МиБ | Просмотров: 7247 ]
20131031_205703.jpg [ 2.81 МиБ | Просмотров: 7247 ]
. К ней планирую прикрепить колеса и все смонтировать
3. Электроника
Самое интересное - начинка. Идея такая Роутер - Переходник -UART- Главная плата -SPI-Куча модулей. Главная плата помимо организации связи с модулями меряет напряжение на аккумуляторе и в случае предельно низкого напряжения отключает аккумулятор(чтоб он не помер). (Продолжение следует)



 Пока все это дело заморожу буду думать как сделать гусеничную платформу и размер побольше.
Пока все это дело заморожу буду думать как сделать гусеничную платформу и размер побольше.