а я так и не сделал ничего. я вообще собирался только шаги считать да наверх слать (в порт) для использования для SLAM.
не думаю что там что то супер сложное.
допустим n1 число шагов на первом n2 на втором. логика такая
y = n1-n2;
if y>100{шим1 ++;шим2 --;}
if y<-100{шим2 ++;шим1 --;}
ну и можно время от времени обнулять n1,n2
по-любому в сети 100500 кода для моторов с энкодерами
roboforum.ru
Технический форум по робототехнике.
Робот-разведчик
Re: Робот-разведчик
Спасибо за подсказку! Но как это сделать программно, я не представляю. Искал по форумам скетчи, но пока безрезультатно. Просто ничего похожего!
Re: Робот-разведчик
Это задача PID регулирования.
Нужно для начала осознать ЧТО хочется регулировать, потом PID(он и в африке PID) а потом коэффициенты PID
Последнее это самое сложное )))
Нужно для начала осознать ЧТО хочется регулировать, потом PID(он и в африке PID) а потом коэффициенты PID
Последнее это самое сложное )))
Re: Робот-разведчик
Спасибо хоть за какие-то разъяснения!
Последней фразой особенно "утешил".
Последней фразой особенно "утешил".
Re: Робот-разведчик
Дорогие коллеги!
Поздравляю всех с Днем Победы!
Желаю здоровья, счастья и мирного неба!
Поздравляю всех с Днем Победы!
Желаю здоровья, счастья и мирного неба!
Re: Робот-разведчик
Завершил робота, прокладывающего маршруты.
Добавлено спустя 6 минут 38 секунд:
Робот, прокладывающий маршруты.
Добавлено спустя 3 минуты 35 секунд:
Добавлено спустя 6 минут 38 секунд:
Робот, прокладывающий маршруты.
Добавлено спустя 3 минуты 35 секунд:
Re: Робот-разведчик
Сегодня испытали Робота на ШД. Выставляю видео его первого маршрута.
http://youtu.be/mgJEXhS_ZJ4
Старт, прохождение простенького маршрута и возвращение на исходную позицию.
http://youtu.be/mgJEXhS_ZJ4
Старт, прохождение простенького маршрута и возвращение на исходную позицию.
Re: Робот-разведчик
Друзья! Робот на ШД проходит заданные маршруты с большой точностью, но уж очень не тороплив.
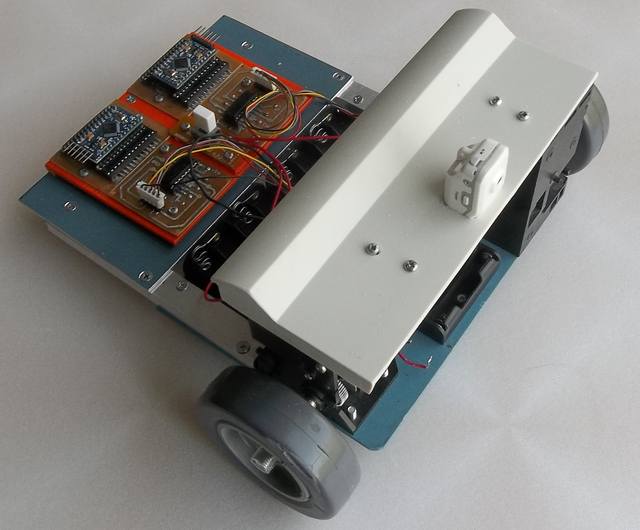
Выставленный на стр.2 робот с камерой организован на мотор-редукторах постоянного тока и, к сожалению, имеет хорошую скорость, но плохую точность выполнения маршрута! Помогите со скотчем для Ардуино по применению энкодеров! Пожалуйста!
Выставленный на стр.2 робот с камерой организован на мотор-редукторах постоянного тока и, к сожалению, имеет хорошую скорость, но плохую точность выполнения маршрута! Помогите со скотчем для Ардуино по применению энкодеров! Пожалуйста!
Re: Робот-разведчик
а локализацию на чем делаете? только инкодеры колес?
Re: Робот-разведчик
то что в видео - на шаговых двигателях, т.е. нет ОС, там прямое управление с заданием в углах поворота. Если проскальзывания отсутствуют то будет работать идеально, что и видно на видео )
Re: Робот-разведчик
Давно я тут не появлялся
Сейчас я изготовил новую плату-контроллер двигателей и серв со встроенной зарядкой свинцового аккума.
На плате есть 5 силовых выходов на 12 вольт(через ULN2003), 3 ШИМ для моторов и для двух моторов есть по 2 выхода на выбор направления движения, 3 сервы, разъем для подключения сонара HC-SR04, выход на 12В для подключения драйвера моторов и 5В для питания мозгов(в качестве мозгов буду использовать либо TPLink mr3020 или OrangePI PC, пока еще не определился до конца).
Управляется все по UART.
При разрядке аккума ниже 10,5В аккум отключается.
При отключении зарядки плата переходит на питание от аккума, при подключении зарядки плата питается от зарядки а внутренний аккум заряжается.
Аккумулятор на 3.2Ач 12В, соответственно под него рассчитана зарядка на микрухе L200C.
Выглядит вот так
Сейчас я изготовил новую плату-контроллер двигателей и серв со встроенной зарядкой свинцового аккума.
На плате есть 5 силовых выходов на 12 вольт(через ULN2003), 3 ШИМ для моторов и для двух моторов есть по 2 выхода на выбор направления движения, 3 сервы, разъем для подключения сонара HC-SR04, выход на 12В для подключения драйвера моторов и 5В для питания мозгов(в качестве мозгов буду использовать либо TPLink mr3020 или OrangePI PC, пока еще не определился до конца).
Управляется все по UART.
При разрядке аккума ниже 10,5В аккум отключается.
При отключении зарядки плата переходит на питание от аккума, при подключении зарядки плата питается от зарядки а внутренний аккум заряжается.
Аккумулятор на 3.2Ач 12В, соответственно под него рассчитана зарядка на микрухе L200C.
Выглядит вот так
- Вложения
-
Re: Робот-разведчик
брутальненько
Re: Робот-разведчик
Вчера занялся подвеской.
Ход подвески получается 6 сантиметров. Колеса будут диаметром 11 сантиметров, вроде норм получается.
Чет закралась мысль вместо пружин-амортизаторов использовать инсулиновые шприцы - типа пневмоподвески. Нужно будет сделать 5 пневмоклапанов и насос. Всю ночь не спалось все обмозговывал как это сделать. Есть мысли, если получится выложу результаты, если не получится то буду подбирать пружинки.
Ход подвески получается 6 сантиметров. Колеса будут диаметром 11 сантиметров, вроде норм получается.
Чет закралась мысль вместо пружин-амортизаторов использовать инсулиновые шприцы - типа пневмоподвески. Нужно будет сделать 5 пневмоклапанов и насос. Всю ночь не спалось все обмозговывал как это сделать. Есть мысли, если получится выложу результаты, если не получится то буду подбирать пружинки.
Re: Робот-разведчик
Неудачная попытка сделать клапан. Воздух пропускает в закрытом положении 
Re: Робот-разведчик
Может лучше взять готовый сантехнический кран, работающий по тому же принципу? Правда такой слабой сервой там не обойтись.