Второго Разведчика собираюсь делать на двухдвижительной платформе с поддерживающим свободным колесом. Его вид представляю:
Добавлено спустя 2 минуты 16 секунд:
И вид снизу:
roboforum.ru
Технический форум по робототехнике.
Робот-разведчик
Re: Робот-разведчик
- Вложения
-
-
Re: Робот-разведчик
А почему разведчик? Что и зачем он разведывает?
Re: Робот-разведчик
Планирую сделать саперный комплекс, состоящий из Робота-сапера и трех Разведчиков с разными мехатрониками. Однодвижительный Разведчик уже сделан и испытан (смотри на предыдущей странице). Этот Разведчик 2. Будет еще Разведчик 3, вездеходный.
Разведывать будут наличие подозрительных (взрывоопасных) предметов.
Разведывать будут наличие подозрительных (взрывоопасных) предметов.
Re: Робот-разведчик
Вчерне сделал Разведчика 2 с вариантами оснастки - камерой или регистратором. Вот, что получилось.
Добавлено спустя 2 минуты 58 секунд:
Авот другой вариант, с регистратором.
Добавлено спустя 11 минут 46 секунд:
Ребята, обращаюсь к вам за советом. Не знаю на чем остановиться, чтобы продолжить работу дальше.
Есть несколько вариантов с "мозгами":
1. На Аррдуино. Сейчас на роботе стоит UNO и шилд моторов.
2. Блутуз. Есть "свисток" и платочка блутуз.
3. Управление от ПДУ.
Что посоветуете?
Добавлено спустя 2 минуты 58 секунд:
Авот другой вариант, с регистратором.
Добавлено спустя 11 минут 46 секунд:
Ребята, обращаюсь к вам за советом. Не знаю на чем остановиться, чтобы продолжить работу дальше.
Есть несколько вариантов с "мозгами":
1. На Аррдуино. Сейчас на роботе стоит UNO и шилд моторов.
2. Блутуз. Есть "свисток" и платочка блутуз.
3. Управление от ПДУ.
Что посоветуете?
- Вложения
-
-
Re: Робот-разведчик
Ребята, кто-нибудь работал с блютузом на маленькой платке с МС ВС417?
Ее вид по ссылке http://cxem.net/arduino/arduino63.php
Там необходимо припаивать несколько проводов.
Надо вскрывать термоусадку?
Добавлено спустя 1 минуту 28 секунд:
Плата синяя.
Ее вид по ссылке http://cxem.net/arduino/arduino63.php
Там необходимо припаивать несколько проводов.
Надо вскрывать термоусадку?
Добавлено спустя 1 минуту 28 секунд:
Плата синяя.
Re: Робот-разведчик
Выставляю вид нашего роботодрома с полосой препятствий, эстакадой, горой и прочим. Если будут какие-либо замечания, вопросы, предложения - с удовольствием их прочитаю, и вполне возможно, что применю что-то из них.
- Вложения
-
Re: Робот-разведчик
Сегодня завершили работу над отделением разведки. Предлагаю вашему вниманию его изображение.
Добавлено спустя 2 минуты 5 секунд:
Провели испытания Разведчика 1 с регистратором. Чуть позже выставлю ролик.
Добавлено спустя 2 минуты 5 секунд:
Провели испытания Разведчика 1 с регистратором. Чуть позже выставлю ролик.
- Вложения
-
Re: Робот-разведчик
Petr Kiselev писал(а):Сегодня завершили работу над отделением разведки. Предлагаю вашему вниманию его изображение.
Добавлено спустя 2 минуты 5 секунд:
Провели испытания Разведчика 1 с регистратором. Чуть позже выставлю ролик.
О, уже целый зоопарк разведчиков! Респект!

Re: Робот-разведчик
Просто я работаю преподавателем робототехники и это мои, так называемые, учебные пособия. Здесь представлены практически все основные мехатроники: однодвижительная, двухдвижительная и четырех движительная. Ну и венчать весь этот "зоопарк" будет робот-сапер. Его, надеюсь, увидите через недельку.
Re: Робот-разведчик
В основном закончил механическую работу над роботом-сапером.
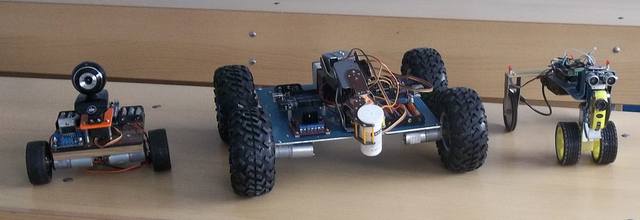
Робот-сапер и два Разведчика.
Добавлено спустя 6 минут 34 секунды:
Вид робота-сапера с вытянутым захватом.
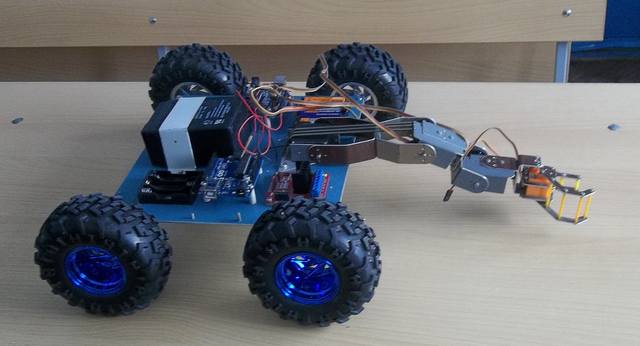
Теперь начнется основная работа - программирование.
Робот-сапер и два Разведчика.
Добавлено спустя 6 минут 34 секунды:
Вид робота-сапера с вытянутым захватом.
Теперь начнется основная работа - программирование.
Re: Робот-разведчик
Завершили полностью нашего роботодрома с горой, полосой препятствий и эстакадой. Провели испытания Разведчика 3.
Выставляю видео.
https://www.youtube.com/watch?v=dDpS2JZWVS8
Выставляю видео.
https://www.youtube.com/watch?v=dDpS2JZWVS8
Re: Робот-разведчик
Хотелось бы увидеть робота-сапёра в действии. За проект респект, очень достойно 
Re: Робот-разведчик
Спасибо за оценку по разведчикам! С 1-м и 3-им все в порядке. Они окончательно сделаны и функционируют нормально. Вот с Разведчиком 2 есть затруднения. Моторы работают нестабильно, левый уводит немного в сторону, и поэтому маршруты (один и тот же скетч) получаются немного разные. Надо ставить датчики скоростей на моторы.
Ребята, помогите с их применением! Хочу применить вот такие:
http://www.aliexpress.com/item/10PCS-XT ... 87914.html
Откликнитесь, кто работал с ними!
Добавлено спустя 3 минуты 20 секунд:
Извините, не ответил по роботу-саперу. Мы еще не решили по его передвижению. Есть несколько вариантов.
Работа с манипулятором и захватом будет по радиоуправлению от ПДУ.
Ребята, помогите с их применением! Хочу применить вот такие:
http://www.aliexpress.com/item/10PCS-XT ... 87914.html
Откликнитесь, кто работал с ними!
Добавлено спустя 3 минуты 20 секунд:
Извините, не ответил по роботу-саперу. Мы еще не решили по его передвижению. Есть несколько вариантов.
Работа с манипулятором и захватом будет по радиоуправлению от ПДУ.
Re: Робот-разведчик
Petr Kiselev писал(а):Откликнитесь, кто работал с ними!
что вас интересует?
там 1 оналоговый выход 1 дискретный. пользуете дискретный считаете в коде сколько сделали шагов. можно прерывание организовать считать время. мм?
Re: Робот-разведчик
Нужно синхронизировать работу мотор-редукторов, чтобы они вращались с одинаковыми скоростями. Иначе наблюдается уход в сторону от прямой линии. И при поворотах также идет дисбаланс, и тяжело подбирать время поворота.
Не можете ли вы дать ссылку на подобный скетч работы с датчиками скоростей?
Не можете ли вы дать ссылку на подобный скетч работы с датчиками скоростей?