Проект на микроконтроллере ATTiny2313, схема на картинке:
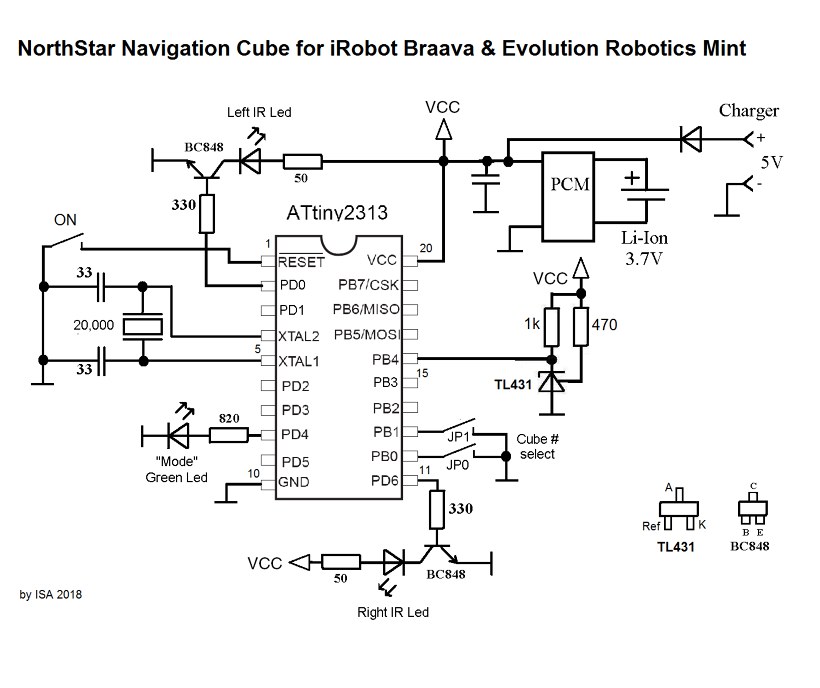
В программе микроконтроллера повторены сигналы куба №1 и куба №4, "снятые" с оригинальных кубов. Сигналы кубов №2 и №3 попытался вычислить эмпирическим путём, но робот моих усилий не оценил
 Номер куба задаётся перемычками JP0-JP1:
Номер куба задаётся перемычками JP0-JP1:JP0 и JP1 не установлены - куб №1,
JP0 и JP1 установлены - куб №4.
Куб включается коротким нажатием на кнопку. После включения работает 2 часа, после чего отключается. В процессе работы светодиод режима мигает с частотой 0.5Гц. Повторным нажатием на кнопку куб можно выключить досрочно.
Для питания предполагается литиевый аккумулятор. Для контроля напряжения на аккумуляторе предназначен узел на TL431 - при понижении напряжения питания ниже 2.5В ус-во произведёт несколько серий "3+1" коротких вспышек светодиодом режима, после чего отключится. Тот-же эффект будет при попытке включить ус-во с разряженным аккумулятором. Если контроль напряжения аккумулятора не нужен или для питания будет выбран другой источник, узел на TL431 можно убрать, а на вход PB4 подать "0".
Аккумулятор предполагается использовать защищённый, поэтому для зарядки используется обычный USB-зарядник.
При повторении устройства ИК-светодиоды следует устанавливать примерно под 120 градусов относительно друг друга и с наклоном примерно в 15-20 градусов "вперёд" (т.е. к центру помещения).
Принцип формирования навигационным кубом двух "инфракрасных пятен" на потолке:

Прошивка в .bin- и .hex-форматах здесь - https://yadi.sk/d/_ut1UjUiLgszvw
Ввиду недавно обнаруженного со стороны китайских "товарищей" внимания к моим поделкам, функциональность выложенной прошивки ограничена 128 включениями/выключениями.
За полной версией прошивки обращаться на 3qСобакаlist.ru или писать здесь.
PS: А стоимость куба у официалов на текущий момент 2900 руб.!
_