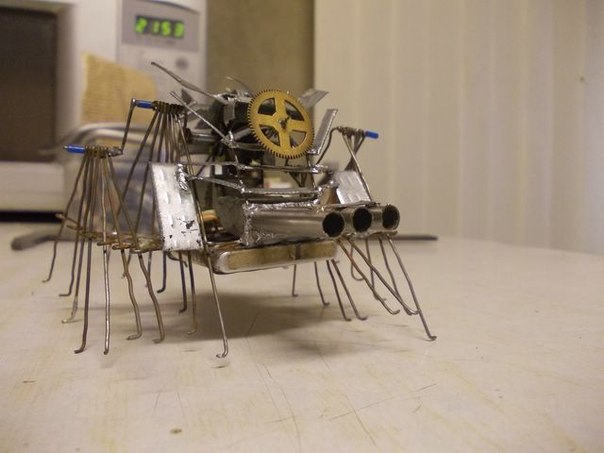

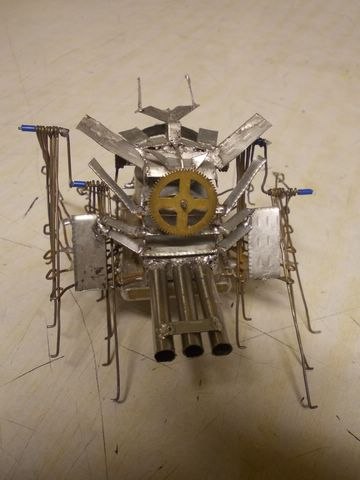


Небольшие изменения.... то ли орден та шестерёнка

...................
люди выручайте!
 3Д.zip
3Д.zip- кто может сделайте гифку анимационную!)
- (409.57 КиБ) Скачиваний: 0
| |
roboforum.ruТехнический форум по робототехнике. |
|
![]() Sergei3090 » 19 сен 2012, 02:28
Sergei3090 » 19 сен 2012, 02:28


![]() MegaBIZON » 19 сен 2012, 04:33
MegaBIZON » 19 сен 2012, 04:33

![]() Sergei3090 » 19 сен 2012, 18:59
Sergei3090 » 19 сен 2012, 18:59


 с таким инетом как у меня... и не возможностью грузить фоты кучами за один раз меня не устраивают
с таким инетом как у меня... и не возможностью грузить фоты кучами за один раз меня не устраивают  а с сервера как-то удобней
а с сервера как-то удобней ![]() elmot » 19 сен 2012, 19:07
elmot » 19 сен 2012, 19:07
![]() MegaBIZON » 19 сен 2012, 19:50
MegaBIZON » 19 сен 2012, 19:50
![]() Sergei3090 » 25 сен 2012, 14:49
Sergei3090 » 25 сен 2012, 14:49




![]() MegaBIZON » 25 сен 2012, 15:14
MegaBIZON » 25 сен 2012, 15:14

![]() Sergei3090 » 25 сен 2012, 15:42
Sergei3090 » 25 сен 2012, 15:42
телеку было 16 лет и + скачёк напруги в сети (а тут я уж думаю.... виноват ли я  ) ибо взрыв был в то время когда я паял нечто ужасное (не скажу что ). сегодня почему-то пробки вышибло.... почему бы это?
) ибо взрыв был в то время когда я паял нечто ужасное (не скажу что ). сегодня почему-то пробки вышибло.... почему бы это? 
![]() MegaBIZON » 25 сен 2012, 16:41
MegaBIZON » 25 сен 2012, 16:41
![]() Plastilinstyle » 26 сен 2012, 18:45
Plastilinstyle » 26 сен 2012, 18:45

![]() MasterFlomaster » 26 сен 2012, 23:08
MasterFlomaster » 26 сен 2012, 23:08
![]() Radist » 27 сен 2012, 03:42
Radist » 27 сен 2012, 03:42

![]() MegaBIZON » 27 сен 2012, 09:49
MegaBIZON » 27 сен 2012, 09:49
![]() Radist » 27 сен 2012, 10:24
Radist » 27 сен 2012, 10:24
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0