перерисовывать со стандартных серв на микро, жестяк. в сети же хватает мест, где взять чертежи для паучков на микросервах.
у него ардуино мега без внешнего сервоконтроллера. библиотека servo на ней вроде до 48 серв поддерживает. на уно вроде до 12, можно ли переделать её, что бы 18 поддерживало... лениво глубже копать, что бы выяснить, что можно ли на уно больше выжать и есть ли другие готовые библиотеки, в которых это уже сделано. тем более у вас какой-то шилд непонятный, свободных пинов [почти] не останется + в пень все эти извраты, когда для уно можно использовать один или несколько внешних сервоконтроллеров, которые упростят не только с пинами.
"остальное все так же. управляющие пины для серв с 22 по 39"

не, тот код даже откомпилирует, но как бы так помягче? есть пины 0-13, ещё есть a0-a5 (вроде числом это 14-19) и всё. что за пины будут после 19 и будет ли вообще какие-то пины задействовать, что будет при работе библиотеки servo при попытке работы за пределами массива, хз. хотя раз не упоминали, значит всё нормально. момент с шилодом и джойстиками туда же.
код у него ужас, ужас. для "о!!! оно шевелитсо" сойдёт, а так это... это демонстрационное чудо "как не надо делать" только стирать. хочется джойстик, для начала хоть просто с ацп данные получать и хоть в уарт на компьютер отправлять. хекса можно пузом на книжки, коробку или ещё на что, что бы лапы в воздухе болтались. можно для начала и одну лапу взять и к чему прикрутить. и начинать разбираться с сервами - управляющие импульсы, их диапазон, калибровка и т.д. как лапами управлять... хоть так по дурацки, как в том проекте. можно секвенсор, хотя это и не особо лучше. есть намного более хорошие варианты, но пока об это немного рановато.
стабилизатор ардуино даже парочку таких серв при нагрузке не должен выдержать, т.е. питать их от аккумулятора или внешнего блока питания. им примерно 5в нужно. земдя с ардуиновской должна быть соединена. одной лапы достаточно что бы прорабатывать, как управлять + пока не определился, с этим непонятным шилдом работать или другой взять, будут свободные пины для джойстика или ещё чего.



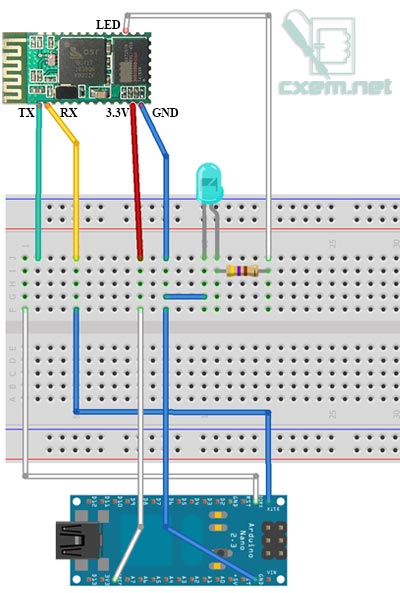
 нет никаких блютузов и управления со смартфона. открываю вторую. и в ней нет.
нет никаких блютузов и управления со смартфона. открываю вторую. и в ней нет.{kind=link}
{kind=link}