Технический форум по робототехнике.
sam_rain » 16 сен 2008, 13:24
Допустим, будет у меня следующая трехколесная конструкция:
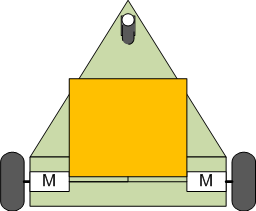
Переднее колесо - свободно вращающееся, задние - каждое приводимое в движение своим двигателем.
Если один из двигателей будет отключен, а второй - будет работать, то поворот (к примеру, на линолиуме) будет происходить вокруг неподвижного заднего колеса, или тележка будет иметь какую-то другую ось вращения?
=DeaD= » 16 сен 2008, 13:35
Да, если считать подкатывающее колёсико идеальным.
avr123.nm.ru » 16 сен 2008, 17:56
И если колесо будет действительно не подвижным. А можно его еще и в другую сторону закрутить ...
Virtex » 02 ноя 2008, 19:52
2 варианто либо на 2е колесо даём реверс ... (это очень спорно если используеться только 2 ведущих колеса)
если интересно могу обьяснить почему(это надолго)
либо колесо вокруг которого происходит разворот нужно остановить ... те при его свободном вращении (защёт движения самой плотформы) и часточно сопративления оказываемого 1й колёсной парой при развороте
радиус разворота неизвестен ... при стоящем же колесе либо реверсе можно говорить о какихто близких к реальности цифрам ...
Виталий » 02 ноя 2008, 22:18
Скажите, а как вы думаете, в какую сторону выгоднее у этого робота сделать "перед" и почему?
avr123.nm.ru » 02 ноя 2008, 22:42
наверно где колеса с мотором как у кар.
Duhas » 03 ноя 2008, 11:14
Virtex, объясняй что там и почему спорно )) и пускай это будет надолго..
перед лучше делать там где ведущие колеса... это на ползу той же проходимости...
Shamanestr » 19 апр 2009, 02:33
Разница в том что у тебя сзади хвост висеть или спереди будет.
Ничего не меняется (здесь понятса только радиус разворота могёт)
Так что делай смело, если что клемы местами поменяеш оно наоборот поедет.