| |
roboforum.ruТехнический форум по робототехнике. |
|
|
AVM Navigator для RoboRealm практическое применение
Re: AVM Navigator для RoboRealm практическое применение
![]() legion » 27 ноя 2011, 12:45
legion » 27 ноя 2011, 12:45
Блин, выглядит как вид из глаз терминатора =) Круто.
- legion
- Сообщения: 736
- Зарегистрирован: 24 апр 2010, 14:47
- Откуда: Уфа
- прог. языки: avr asm
| Реклама | ||||
|
|
|
|||
Re: AVM Navigator для RoboRealm практическое применение
![]() Scorpio » 28 ноя 2011, 16:50
Scorpio » 28 ноя 2011, 16:50
Четко так маршрутик прошел. В нашем полку прибыло! 
-

Scorpio - Сообщения: 2702
- Зарегистрирован: 30 сен 2008, 18:49
- Откуда: Где-то в Латинской Америке
Re: AVM Navigator для RoboRealm практическое применение
![]() =DeaD= » 10 дек 2011, 23:08
=DeaD= » 10 дек 2011, 23:08
Так, EDV, вопросец - а какой FPS минимальный нужен твоему навигатору? И насколько важна стабильность FPS?
У меня сейчас с DIR-320 пока только через snapshot'ы видео получилось грузить - 7-15fps примерно на 320х240.
Виртуальный COM-порт до контроллера думаю завтра тоже через ser2net подключу, если прошивка сработает.
В общем хочется навигатор запустить на роботе на основе DIR-320.
У меня сейчас с DIR-320 пока только через snapshot'ы видео получилось грузить - 7-15fps примерно на 320х240.
Виртуальный COM-порт до контроллера думаю завтра тоже через ser2net подключу, если прошивка сработает.
В общем хочется навигатор запустить на роботе на основе DIR-320.
-

=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: AVM Navigator для RoboRealm практическое применение
![]() EDV » 16 дек 2011, 17:45
EDV » 16 дек 2011, 17:45
Можно, конечно и на 7-15fps попробовать, но думаю, что это маловато, нужно стремиться к 25fps, а то программа просто не сможет роботом управлять корректно, типа сигнал дали на поворот, а из-за задержки при захвате изображения, когда получим видеокадр, то окажется что с поворотом уже «пролетели» и придётся в обратную сторону поворачивать, и опять «пролетели» и так до бесконечности. Ну или скорость движения и поворота при 7-15fps, тогда нужно будет уменьшить до скорости улитки 
Последний раз редактировалось EDV 16 дек 2011, 17:47, всего редактировалось 1 раз.
-

EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: AVM Navigator для RoboRealm практическое применение
![]() =DeaD= » 16 дек 2011, 17:47
=DeaD= » 16 дек 2011, 17:47
Неее... latency и fps - разные вещи. Может быть 25fps и задержка в 1 секунду, а может быть 15fps и задержка 0.1сек 
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
| Реклама | ||||
|
|
|
|||
Re: AVM Navigator для RoboRealm практическое применение
![]() EDV » 16 дек 2011, 17:52
EDV » 16 дек 2011, 17:52
В общем, только эксперименты могут дать ответ. Очевидно, что при значительной задержке изображения, программа не сможет рулить роботом, а просто начнёт вилять из стороны в сторону, типа как здесь:
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: AVM Navigator для RoboRealm практическое применение
![]() tenik » 16 дек 2011, 21:58
tenik » 16 дек 2011, 21:58
а у меня авм навигатор не реагирует на стрелки и не даёт рулить ботом вручную  причём сам как то рулит, а руками не позволяет куда можно покопать?
причём сам как то рулит, а руками не позволяет куда можно покопать?
причём сам как то рулит, а руками не позволяет куда можно покопать?- tenik
- Сообщения: 49
- Зарегистрирован: 19 апр 2010, 23:19
- Откуда: Новоград-Волынский, Украина
- прог. языки: с, php
- ФИО: Андрей
Re: AVM Navigator для RoboRealm практическое применение
![]() EDV » 16 дек 2011, 23:18
EDV » 16 дек 2011, 23:18
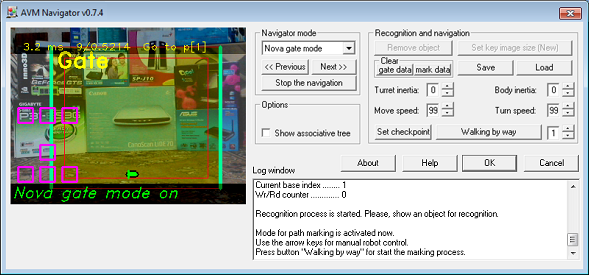
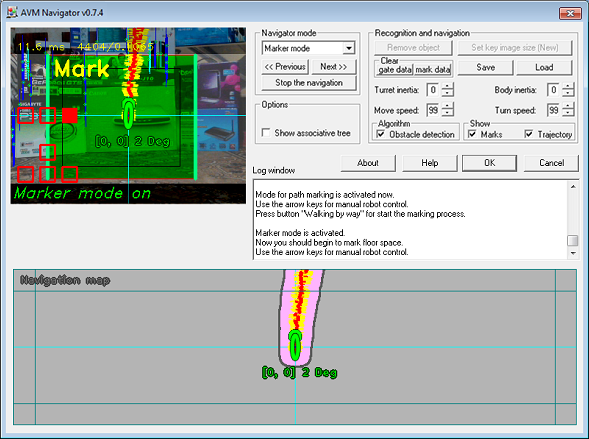
Навигатор даёт «рулить» вручную стрелками только в двух режимах: в режиме «Nova gate mode» (без записи маршрута) и в «Marker mode» (с записью маршрута):
Как записывать маршрут, в этом ролике хорошо продемонстрировано:
Что бы подключить Навигатор к вашему роботу, нужно использовать переменные, описанные ниже:
Если с английским трудности, то я переведу, спрашивайте
Добавлено спустя 8 минут 21 секунду:
Вот здесь есть, много информации о пользовании модулем «AVM Navigator», но всё на английском, а всё потому, что русскоязычные пользователи, пока что не проявляют особого интереса к этому модулю. Так что будут вопросы, будут и ответы на родном русском языке.
Как записывать маршрут, в этом ролике хорошо продемонстрировано:
Что бы подключить Навигатор к вашему роботу, нужно использовать переменные, описанные ниже:
* Connect your robot to AVM Navigator
Just use the variables that described below for connection of your robot
to AVM Navigator:
Use variable NV_TURRET_BALANCE for camera turning:
NV_TURRET_BALANCE - indicates the turn degree amount.
This value range from -100 to 100 with forward being zero.
Use for motor control NV_L_MOTOR and NV_R_MOTOR variables that have range
from -100 to 100 for motion control ("-100 " - full power backwards,
"100" - full power forwards, "0" - motor off).
You also can used alternative control variables
(motors range from 0 to 255 with 128 being neutral):
NV_L_MOTOR_128, NV_R_MOTOR_128 - motors control
NV_TURRET_128 - control of camera turning
NV_TURRET_INV_128 - inversed control of camera turning
Если с английским трудности, то я переведу, спрашивайте
Добавлено спустя 8 минут 21 секунду:
Вот здесь есть, много информации о пользовании модулем «AVM Navigator», но всё на английском, а всё потому, что русскоязычные пользователи, пока что не проявляют особого интереса к этому модулю. Так что будут вопросы, будут и ответы на родном русском языке.
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: AVM Navigator для RoboRealm практическое применение
![]() tenik » 17 дек 2011, 00:00
tenik » 17 дек 2011, 00:00
не рулит он всё уже перечитал и пересмотрел. сам по себе плагин двигает и камеру на серве и робот двигается. а на нажатие клавиш реакции ноль
всё уже перечитал и пересмотрел. сам по себе плагин двигает и камеру на серве и робот двигается. а на нажатие клавиш реакции ноль - tenik
- Сообщения: 49
- Зарегистрирован: 19 апр 2010, 23:19
- Откуда: Новоград-Волынский, Украина
- прог. языки: с, php
- ФИО: Андрей
Re: AVM Navigator для RoboRealm практическое применение
![]() =DeaD= » 17 дек 2011, 09:34
=DeaD= » 17 дек 2011, 09:34
Окно плагина навигатора при этом открыто? Фокус на нём?
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
- tenik
- Сообщения: 49
- Зарегистрирован: 19 апр 2010, 23:19
- Откуда: Новоград-Волынский, Украина
- прог. языки: с, php
- ФИО: Андрей
Re: AVM Navigator для RoboRealm практическое применение
![]() EDV » 17 дек 2011, 12:54
EDV » 17 дек 2011, 12:54
Какую версию AVM Navigator и версию Windows используете?
А если немного извратиться и попробовать из внешнего приложения управлять:
Добавлено спустя 15 минут 29 секунд:
Может, какие-нибудь защиты, установленные на вашем компьютере, типа «Firewall», не дают (мешают) перехватить модулю «AVM Navigator» низкоуровневый обработчик клавиатуры (что бы «рулить» стрелками, совсем не обязательно удерживать фокус на диалоговом окне Навигатора, можно и окно RoboRealm свернуть на панель задач, и всё равно стрелками рулить будет).
А если немного извратиться и попробовать из внешнего приложения управлять:
You should use arrow keys for robot control in "Marker mode"
(it is important for route recording).
But you can also control your robot through AVM Navigator from external application
with helping of control variables:
NV_FIRE, NV_LEFT, NV_RIGHT, NV_FORWARD, NV_BACKWARDS, NV_TURRET_LEFT, NV_TURRET_RIGHT.
The double purpose of control variables (in/out functions) is already implemented since
as AVM Navigator v0.7.2.3 was released. And now variables (NV_FIRE, NV_LEFT, NV_RIGHT,
NV_FORWARD, NV_BACKWARDS, NV_TURRET_LEFT, NV_TURRET_RIGHT) indicate control status
(if use it after AVM Navigator in pipeline) as in previous versions but also it has
secondary function as input of control signals from external application.
Now users will be able to set value of these variables to “-1” (before AVM Navigator in pipeline)
for activation of control action from scripts or other modules or external application
(through API and "control translator" script).
Find out more: http://www.roborealm.com/forum/index.php?thread_id=4253#
Добавлено спустя 15 минут 29 секунд:
Может, какие-нибудь защиты, установленные на вашем компьютере, типа «Firewall», не дают (мешают) перехватить модулю «AVM Navigator» низкоуровневый обработчик клавиатуры (что бы «рулить» стрелками, совсем не обязательно удерживать фокус на диалоговом окне Навигатора, можно и окно RoboRealm свернуть на панель задач, и всё равно стрелками рулить будет).
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: AVM Navigator для RoboRealm практическое применение
![]() EDV » 03 янв 2012, 12:19
EDV » 03 янв 2012, 12:19
RoboRealm снизил цену за лицензированную копию для хоббистов:
- Вложения
-
- RoboRealm_price.PNG (4.53 КиБ) Просмотров: 3835
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: AVM Navigator для RoboRealm практическое применение
![]() NeON79 » 04 янв 2012, 22:59
NeON79 » 04 янв 2012, 22:59
А скажите-ка, господа, где взять-то этот самый АВМНавигатор, который бы работал с бесплатной версией РобоРеалма?
-

NeON79 - Сообщения: 536
- Зарегистрирован: 09 май 2011, 16:43
- Откуда: Украина, Киев
- прог. языки: Нецензурный
- ФИО: Евгений НеОН
Re: AVM Navigator для RoboRealm практическое применение
![]() EDV » 05 янв 2012, 18:18
EDV » 05 янв 2012, 18:18
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Вернуться в Компьютерное зрение
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0