1) масса сервы с проводом по факту 62,18г , 55г - паспортный вес, возможно без учёта провода.
В упаковке так же находятся пара качалок (полу плечо и планка качалка ), крепёжные саморезы в комплекте с резиновыми втулками и трубочками для посадки втулок. Вес комплекта с учётом упаковки 75грамм
2) не разбирал, предполагаю что все.
3) сейчас выложу картинку с размерами прямо в карточку описания товара
4) если смотреть по аналогии с другими сервами в механизм трения просто введена порция густой смазки, по крайней мере это видно на прозрачных HXT900
| |
roboforum.ruТехнический форум по робототехнике. |
|
shop.roboforum.ru / Ассортимент
Re: shop.roboforum.ru / Ассортимент
![]() setar » 28 июл 2009, 23:01
setar » 28 июл 2009, 23:01
-

setar - Site Admin
- Сообщения: 10992
- Зарегистрирован: 04 окт 2004, 12:58
- Откуда: St.Petersburg
- Skype: taranenko.sergey
- ФИО: Сергей Тараненко
Re: shop.roboforum.ru / Ассортимент
![]() ALHIMIK » 28 июл 2009, 23:08
ALHIMIK » 28 июл 2009, 23:08
Какой диаметр отверстий для крепежа
какое растояние между этеми отвестиями
какое растояние между этеми отвестиями
-

ALHIMIK - Сообщения: 997
- Зарегистрирован: 05 окт 2008, 14:41
- Откуда: СПб
- прог. языки: C,Python
Re: shop.roboforum.ru / Ассортимент
![]() setar » 28 июл 2009, 23:28
setar » 28 июл 2009, 23:28
поправил описалово,
крепежные отверстия такие:
4 отверстия на углах прямоугольника 10x48mm
отверстия диаметром 4мм под резиновую втулку, посадочные саморезы 2мм (саморезы, втулка , трубка/вкладыш втулки : в комплекте)
Добавлено спустя 34 секунды:
вообще в планах модель SolidWorks выкладывать по сервам.
крепежные отверстия такие:
4 отверстия на углах прямоугольника 10x48mm
отверстия диаметром 4мм под резиновую втулку, посадочные саморезы 2мм (саморезы, втулка , трубка/вкладыш втулки : в комплекте)
Добавлено спустя 34 секунды:
вообще в планах модель SolidWorks выкладывать по сервам.
-
setar - Site Admin
- Сообщения: 10992
- Зарегистрирован: 04 окт 2004, 12:58
- Откуда: St.Petersburg
- Skype: taranenko.sergey
- ФИО: Сергей Тараненко
Re: shop.roboforum.ru / Ассортимент
![]() ALHIMIK » 29 июл 2009, 00:15
ALHIMIK » 29 июл 2009, 00:15
Благодарю
А не скромный вопрос можно ?
А не скромный вопрос можно ?
-
ALHIMIK - Сообщения: 997
- Зарегистрирован: 05 окт 2008, 14:41
- Откуда: СПб
- прог. языки: C,Python
-
setar - Site Admin
- Сообщения: 10992
- Зарегистрирован: 04 окт 2004, 12:58
- Откуда: St.Petersburg
- Skype: taranenko.sergey
- ФИО: Сергей Тараненко
Re: shop.roboforum.ru / Ассортимент
![]() ALHIMIK » 29 июл 2009, 00:24
ALHIMIK » 29 июл 2009, 00:24
угол полного поворота 180 или 90 ?
имеется в виду максимальный угол при подаче импульсов
имеется в виду максимальный угол при подаче импульсов
-
ALHIMIK - Сообщения: 997
- Зарегистрирован: 05 окт 2008, 14:41
- Откуда: СПб
- прог. языки: C,Python
Re: shop.roboforum.ru / Ассортимент
![]() setar » 29 июл 2009, 00:30
setar » 29 июл 2009, 00:30
не очень понятная формулировка
от нуля + и - 90град
получается ход качалки от максимальной до минимальной скважности управляющего сигнала 180град
механический запас хода примерно 190град
от нуля + и - 90град
получается ход качалки от максимальной до минимальной скважности управляющего сигнала 180град
механический запас хода примерно 190град
-
setar - Site Admin
- Сообщения: 10992
- Зарегистрирован: 04 окт 2004, 12:58
- Откуда: St.Petersburg
- Skype: taranenko.sergey
- ФИО: Сергей Тараненко

Re: shop.roboforum.ru / Ассортимент
![]() setar » 04 авг 2009, 19:57
setar » 04 авг 2009, 19:57
Если вдруг кто ожидал - приехала партия модулей OR-PROG-USB
с учётом всех обещанных (отложенных) модулей даже пара свободных осталась.
с учётом всех обещанных (отложенных) модулей даже пара свободных осталась.
-
setar - Site Admin
- Сообщения: 10992
- Зарегистрирован: 04 окт 2004, 12:58
- Откуда: St.Petersburg
- Skype: taranenko.sergey
- ФИО: Сергей Тараненко
Re: shop.roboforum.ru / Ассортимент
![]() SkyStorm » 18 сен 2009, 14:08
SkyStorm » 18 сен 2009, 14:08
По поводу поступившей лазерной нарезки, надо бы размеры указать в описании.
-

SkyStorm - Сообщения: 2687
- Зарегистрирован: 05 фев 2008, 15:33
- Откуда: St. Petersburg - Moscow
- Skype: SkyStorm77
- ФИО: Костюк Константин Вячеславович
Re: shop.roboforum.ru / Ассортимент
![]() =DeaD= » 18 сен 2009, 14:37
=DeaD= » 18 сен 2009, 14:37
И правда  ща будем исправляться.
ща будем исправляться.
Добавлено спустя 20 секунд:
По крайней мере по основным пунткам.
Добавлено спустя 22 минуты 39 секунд:
Внёс размеры короба, длину звеньев манипулятора, габариты захвата и некоторые другие их основные параметры.
ща будем исправляться.Добавлено спустя 20 секунд:
По крайней мере по основным пунткам.
Добавлено спустя 22 минуты 39 секунд:
Внёс размеры короба, длину звеньев манипулятора, габариты захвата и некоторые другие их основные параметры.
-

=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: shop.roboforum.ru / Ассортимент
![]() =DeaD= » 18 сен 2009, 15:59
=DeaD= » 18 сен 2009, 15:59
Потому что под 113мм можно найти недорогие сантехнические уплотнения я тут покупал по 25р за пару, которые замечательно встают между этими дисками, на фото они:
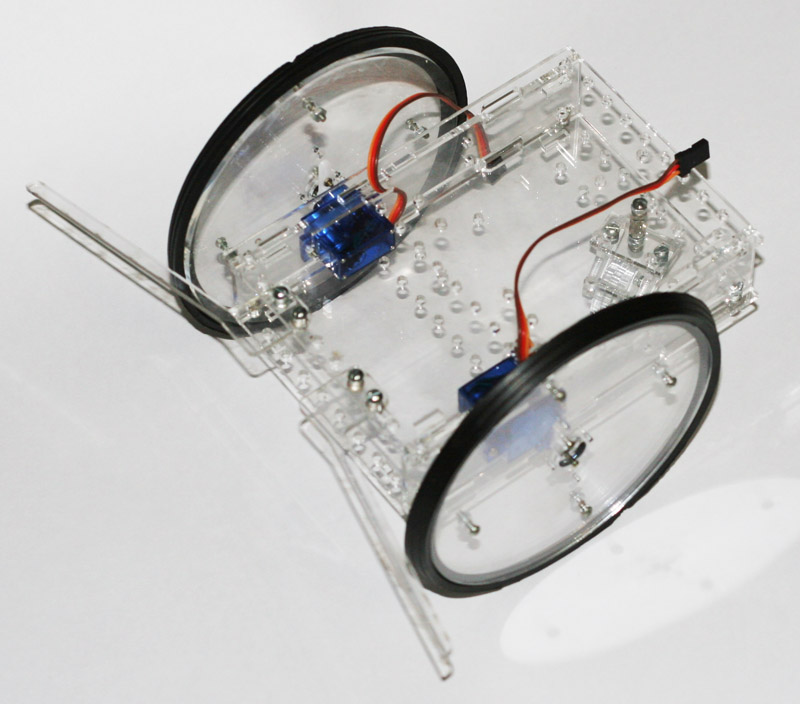
А вот под 95мм и чуть меньше не нашел ничего похожего. Только 40мм, но это жуть как мало.
я тут покупал по 25р за пару, которые замечательно встают между этими дисками, на фото они:А вот под 95мм и чуть меньше не нашел ничего похожего. Только 40мм, но это жуть как мало.
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: shop.roboforum.ru / Ассортимент
![]() =DeaD= » 18 сен 2009, 16:31
=DeaD= » 18 сен 2009, 16:31
10мм, отверстия под М3, спереди и сзади по ряду отверстий идёт. Спереди есть еще вторичный ряд отверстий - с отступом 48мм от первого - это чтобы на стойках можно было серву прикрутить стандартного размера или HXT900 через адаптер (в комплектах всяких PAN / PAN&TILT).
Добавлено спустя 50 секунд:
Ну и разумеется крепежные отверстия под модули OR под радиомодуль только еще отдельную пластину-адаптер забыл пока сделать - скоро наверное соберусь и закажу еще её
Добавлено спустя 50 секунд:
Ну и разумеется крепежные отверстия под модули OR
под радиомодуль только еще отдельную пластину-адаптер забыл пока сделать - скоро наверное соберусь и закажу еще её -
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Вернуться в Организационные вопросы
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0