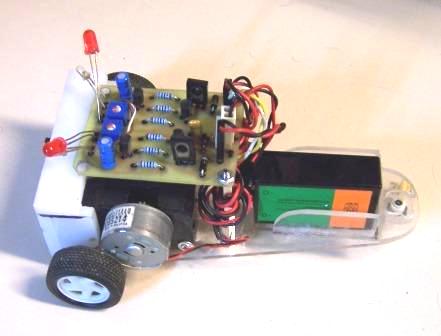
вот же оно! я именно это пытался "изобрести"!.. простой робот, который умно (!) едет на свет. вот его работа: (с) "Когда источник света одинаков для обоих цепочек - мультивибратор выдаёт одинаковые интервалы для обоих моторов и эти работают с одинаковой скоростью... Если нет никакого источника света - робот будет ехать прямолинейно в его поиске до тех пор пока не найдёт источник света... При достижении источника света робот замедляет ход и останавливается." - последнее ваще круто!
Прямо то что мне надо - тупо и бодро а уж усы ему долепить, чтоб бутылки обходил, да на ноги поставить - это я могу.
========= пора рожать поворачивающее ногастое шасси. ...я правда так и не понял, за счёт чего именно он под светом останавливается (кто чё думает?)... но если и правда оно так и есть, то хватило бы мозгов, можно и подзарядку от света примутить
MegaBIZON писал(а):...я правда так и не понял, за счёт чего именно он под светом останавливается (кто чё думает?)
Вот по етому:
MegaBIZON писал(а):(с) "Когда источник света одинаков для обоих цепочек - мультивибратор выдаёт одинаковые интервалы для обоих моторов и эти работают с одинаковой скоростью...
Освещеное плече мультивибратора выдает более короткий импульс чем не освещенное, а если светим на 2 то оба плечика практически не генерируют ничего, правда при слабом источнике оно будет пытатся его протаранить
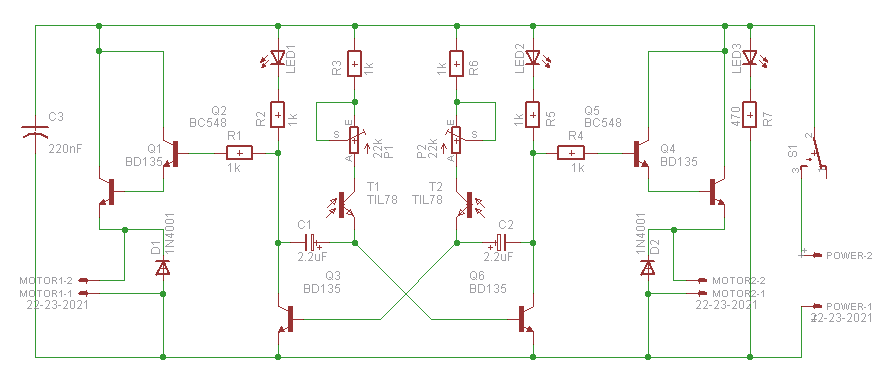
Что-то я разочаровался в последнее время в солнечных батарейках и вибромоторчиках. То солнца нет, то моторчики не тянут. В общем, хочу предложить схему еще одного бима. За основу была взята эта схема, поэтому и продолжаю в этой ветке. Что умеет этот робот: ездить и плавными поворотами искать источник света, при нахождении едет прямо на него, на ярком свету останавливается. Кушает батарейку/аккумулятор, если во что упрется - будет тупо стоять. Теперь что предлагаю я. У робота будут три режима работы: спячка, охота за пищей (за светом) и питание. Эту задачу выполняет один фотодиод и двухпороговый компаратор. У робота будут усы (и как следствие возможность реверса моторов) - а значит объезд препятствий. И самое главное - он не будет просто нежиться на солнышке - он будет заряжать аккумуляторы. Схема перед вами, рассказываю как и что работает. Пусть не смущает, что деталек достаточно много - схема простая (и может быть мы вместе сумеем ее еще больше упростить). Схему я еще не рассчитывал, на номиналы внимание не обращаем. Поехали. Рассмотрим левый верхний угол. Ничего нового - обычный мост, вы эту схему сто раз видели. Главное, чтобы на управление не пришло два нуля, иначе будет сквозняк. Разные сигналы - вращение в разные стороны, две единицы - отключение мотора. Под мостами расположены две идентичные схемы усов. Ус не нажат - на выходе единица, нажат - ноль (с задержкой после отпускания уса, регулируется резистором, параллельным конденсатору). В верхнем правом углу часть схемы, которую я назвал ШИМ-модулятором. Она выдает два ШИМ сигнала (в противофазе), скважность зависит от освещенности (лучше освещенный фотодиод, подключенный к базе, уменьшает длительность импульсов в коллекторе). Теперь рассмотрим логические схемы управления мостами (одну из них, они идентичные). На входе три сигнала: ШИМ, сигнал от уса, сигнал от глаза освещенности. На выходе два сигнала на управление мостом: 01, 10, 11. Справа в центре схема определения освещенности. Если режим охоты за светом - на выходе ноль, в двух других режимах на выходе 1. В нижнем правом углу схема питания. Солнечная батарея на 3 В. Перезаряда не будет.
Почему я не стал делать реверс на релюшках? Причин несколько: - у меня их нет - их нет в рядом расположенных магазинах - схема на релюшках уже была, мне не хочется просто копировать, мне хочется придумать что-то новенькое.
Жду конструктивную критику.
ЗЫ. Правильно ли я понимаю, что левый ус должен реверсировать правый мотор?
Правильно, именно так А про релюшки ты забыл сказать ещё, что они на самом деле ужасные допотопные дрова и громоздкие тяжёлые гробы - и всё это тоже правда Я с релюхами баловался только поэтому - ржачные они. Принципиально на транзах не мутил
А по схеме... я уже совсем от рук отбился, не понимаю в ней ничерта Общую суть какую-то понял, но деталей не просекаю: компараторы и раньше для меня были тёмный лес, скважность всёравно что теория струн и тэдэ...
Но радует меня то, что ты в этом разделе ведёшь такой конструктивный кипиш Когда в пальцах заново зачешется попробовать бима родить - начну с этой твоей схемы
Начал потихоньку макетировать схемку. Мосты я уже давно отмакетировал, они 100% рабочие, резисторы в базах 1 кОм. Только что отмакетировал ШИМ-модулятор. Тоже все отлично работает, параметры такие: коллекторные резисторы 1 кОм, базовые резисторы 10 кОм, хронирующие конденсаторы 1 мкФ, диоды ФДК-155 (потому что они у меня есть, проверял на них). Потребление от источника 2 В меньше 10 мА (амперметр показал 0,00), импульсы как в учебнике. ШИМ модуляция возникает при разном освещении, а сам уровень освещения влияет на частоту ШИМа. В общем, все как по учебнику, теория совпала с практикой. Чуть попозже подберу резисторы для датчика освещенности. Что касается схемы "уса" - вопрос: сколько выбрать задержку реверсирования после отпускания уса? Если поставить кондер на 1 мкФ и резюк на 1 МОм - это даст примерно полсекунды. Хватит или электролит ставить? Логическую схему отрабатывать нечего, надо просто логически подумать . Проблема в отсутствии нужных мне элементов в магазине. Мне ведь не каждые пойдут, а только с низковольтным питанием.
вопрос: сколько выбрать задержку реверсирования после отпускания уса?
это уже "по месту" смотри - на собранном роботе. Там и от конечной скорости колёс-ног зависеть будет, и от веса, и от сложившихся габаритов в какой-то мере...
Судя по отсутствию комментариев к схеме, никто в нее не вникал. А она содержит ошибки. У сдвоенного компаратора выход "разрешение работы" активен 1, а не 0, поэтому инвертор после компараторов убираем. И в схеме уса не все в порядке. Я хотел управлять временем задержки реверсирования с помощью резистора, параллельного конденсатору, поставить его подстроечным. Но базовый переход транзистора портит всю картину. Был бы там полевичок - проблем бы не было. Поэтому выбрасываем транзистор с коллекторной нагрузкой. Но и на этом ошибки не исчерпаны. Зарядный резистор должен быть маленьким, а разрядный большим. А сейчас у меня при отпускании уса кондер разрядится через маленький зарядный резистор. Чтоб этого не произошло - убираем землю от уса.
Выше я писал, что ус отлаживать не надо - там все просто. Чуть не ошибся.
Последний раз редактировалось Radist 27 апр 2010, 10:29, всего редактировалось 1 раз.
Схему свою спаял, покаскадно проверил, в целом все работает как полагается (правда мне не нравится форма импульсов с шим-формирователя). Но есть одно но: мосты не тянут движки, не хватает напряжения. При запитке от лабораторного источника тянут с 3,3 В, а у меня диапазон напряжение 2 - 2,5 В. Пока застрял на этом.
В общем, принял я следующее решение. Мост соберу на более мощных транзисторах (972/973), питание будет от трех аккумуляторов (соответственно солнечная батарея на 4 В). Но вот схема мне разонравилась: деталек много, а функции выполняются простейшие. Я вчера прикинул: микроконтроллер в соик 8 может полностью отвечать за половину бима. У него 5 портов ввода/вывода с ацп на борту. Вешеаем на контролер один глаз и два уса, еще два вывода на управление мостом. Таких контролеров надо два. В результате можно изменить алгоритм объезда препятствия: сперва отъезд, затем объезд. Предыдущая схема так не могла. Предполагаю, что сейчас в мой огород полетят камни: бимы должны быть аналоговыми, если есть программа и контролер - это не бим. Отвечу.
Роботы бывают разные. Одни заточены под решение определенной задачи (сумоисты, лайн-трейсеры), роботы на заводе. Они работают по программе. А кто такие бимы? Это имитация живых организмов, что-то типа электронных животных. Так вот, главное отличие бима от другого робота - предикативная структура, структура "стимул-реакция". Его поведение зависит от информации об окружающей среде, поступающей на его датчики. Пришел сигнал - получи реакцию. Причем в большинстве случаев реакция на одно и то же воздействие одна и та же. Чем не программа, заложенная природой. Пример - фототропизм. Так что я считаю, что если микроконтроллер делает абсолютно тоже самое, что и аналоговая схема, то это не мешает роботу быть бимом. И еще пару слов о питании. Бим может питаться от солнечной батареи, но это не обязательное условие. Можно использовать комбинированное питание (подзарядка аккумуляторов). Хорошо, если солнечных дней много, а если мало? А на аккумуляторах бим будет жить и в пасмурную погоду. Можно для него сделать не фототропизм, а электротропизм, чтоб он при разряде аккумуляторов искал базу и шел на подзарядку. Чем не домашнее животное?




 и тэдэ...
и тэдэ...
