roboforum.ru
Технический форум по робототехнике.
другой принцип позиционирования в станке
другой принцип позиционирования в станке
Есть идея: (точность должна быть во много раз больше)

- Вложения
-
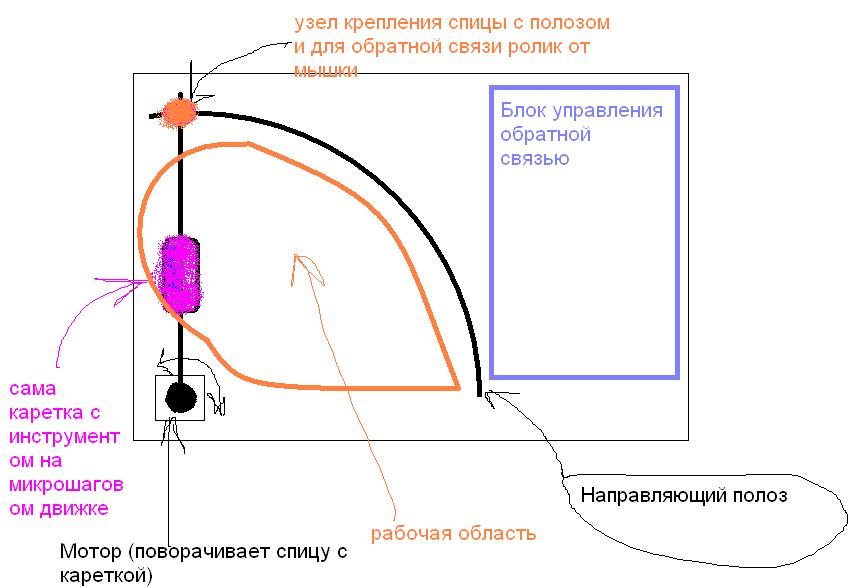
полоз-просто дорожка под колесо для поддержания спицы.
сложность в просчете координат - но прогу составить нетруднодля обратной связи - старая мышка с шариком (работающая) - из нее один ролик ставим на каретку, другой на полоз :D
сложность в просчете координат - но прогу составить нетруднодля обратной связи - старая мышка с шариком (работающая) - из нее один ролик ставим на каретку, другой на полоз :D
Почему вы считаете что переход на полярную систему координат даст повышение точности ?
Я скажу более: точность станет неравномерной, и увеличивающейся при увеличении линейной позиционирующей координаты.
Более того, с увеличением этой координаты растёт плечо нагрузки на угловой позиционирующий механизм и полезная нагрузка уменьшается.
сложности с пересчётом координат не вижу, это линейная геометрия.
Я скажу более: точность станет неравномерной, и увеличивающейся при увеличении линейной позиционирующей координаты.
Более того, с увеличением этой координаты растёт плечо нагрузки на угловой позиционирующий механизм и полезная нагрузка уменьшается.
сложности с пересчётом координат не вижу, это линейная геометрия.
насчет уменьшения точности с приближением к полозу - полностью с Вами согласен, поэтому двигатель можно установить на пересеение спицы и полоза, а рабочую область сместить к оси разворота спицы 
Не ребята, я бы под изготовление такого станка даже не подписался бы.
неподъёмно, чисто технологически!
неподъёмно, чисто технологически!
У меня щас валяется около полтиника горелых сидюков, но из механики там можно заюзать разве что моторчики, червячные передачи не смогут удержить инструмент, слишком хилые...
А можно сделать, что бы каретка тоже по дуге ездила. А ещё стол вращающийся Посмотрите на механику HDD: добавить только привод вертикальной координаты.