Технический форум по робототехнике.
encedent » 12 авг 2010, 19:48
как его заставить ехать по линии
Добавлено спустя 6 минут 3 секунды:или вот этого
 Добавлено спустя 10 минут 13 секунд:
Добавлено спустя 10 минут 13 секунд:если я правильно понимаю, то

MegaBIZON » 12 авг 2010, 21:34
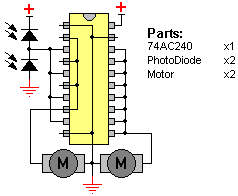
Вот кстати как ваще эти схемки понимать - буржуйские, с треугольничками...
avr123.nm.ru » 12 авг 2010, 21:58
Это
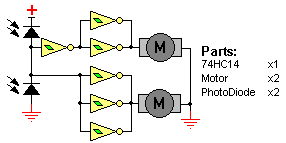
инверторы с тригером шмита на входе типа 74hc14
инверсия - это кружок
триггер - это петля гистерезиса внутри треугольника.
треугольник ПОДсказывает направление прохождения сигнала.
encedent писал(а):как его заставить ехать по линии
Посмотрите статью "
Простой робот без микроконтроллера"
forum16/topic8573.html
Radist » 12 авг 2010, 22:19
Что значит "как заставить этого робота ехать по линии"? Вы его собрали, а он не едет? Или вы спрашиваете как работают эти схемы? По идее не надо его заставлять, он сам поедет, левый моторчик вперед, правый моторчик вперед - остальное само пойдет.
ЗЫ. А почему вопрос в бимы? Это же лайнтрейсер.
vadinator » 12 авг 2010, 23:08
Только моторами, лучше управлять через транзисторные ключи

Radist » 13 авг 2010, 06:58
В качестве транзисторов используются выходы микросхем - логика сама вся сделана на транзисторах, в том числе и выходной каскад. Те же транзисторы, только внутри. А параллелят чтобы не сжечь выходы - мало ли сколько току отъесть мотор.
avr123.nm.ru » 13 авг 2010, 07:39
74ac примерно по 25 мА на выход.
MegaBIZON » 13 авг 2010, 07:47
Radist писал(а):.....ЗЫ. А почему вопрос в бимы? Это же лайнтрейсер.
ну кстати да.
Снес.
encedent » 14 авг 2010, 11:38
Спасибо что перенесли, ну так можно так сделать или нет?
Radist » 14 авг 2010, 18:38
Можно, но есть нюанс. Линия черная на белом фоне. У вас фотодиоды, им нужен свет, значит надо поставить еще светодиод по центру робота, чтоб освещал линию. Еще нюанс в расположении фотодиодов, точнее в расстоянии между ними. Если линия проходит между светодиодами (оба видят белое) - робот включает два мотора и погнал, если один видит черную линию - соответствующий мотор останавливается и робот поворачивает, пока снова линия не станет между фотодиодами. Способ чреват тем, что при хорошей инерции робот улетит с линии при первом же повороте, оба датчика окажутся на белом и робот тупо уедет от линии и все. Если расстояние между датчиками будет меньше ширины линии и при старте один на линии, а другой нет, то робот поедет вихляя, включая моторы по очереди. Медленно и не красиво, а если вдруг оба датчика окажутся на линии - то вообще остановится. Следующий нюанс - регулировка датчиков отсутствует полностью. Надо чтоб при отражении от белого была логическая 1, а при отражении от линии - логический ноль. Уровнем освещения светодиода регулировать? А вечером вы свет включите и уровни уедут, или солнце выйдет из-за туч. Хотя если датчики и осветитель близко к полу - эффект уменьшится. Надеюсь я не настолько напугал, что вы откажетесь от постройки робота. Вливайтесь в наши ряды, собирайте роботов, проблемы конечно будут, но на то и форум, чтобы помогать их решать.
Добавлено спустя 7 минут 14 секунд:
Хотя я несколько наврал. Фотодиоды включены как то странно. Если бы это были фоторезисторы, тогда понятно - был бы делитель напряжения. Хотя и тут эффект наверное такой же. В общем моторы в этих схемах всегда будут работать по очереди, а значит датчики должны быть ближе чем ширина линии. Если оба датчика осветить одинаково - один бог знает какой из моторов закрутится (гистерезисы в триггерах шмитта имеют разброс). Начинайте делать шасси, а электронику (если эти схемы не получится настроить) всегда можно заменить.
encedent » 16 авг 2010, 12:10
спасибо за хороший ответ
Radist » 19 авг 2010, 11:10
