II ОТКРЫТЫЕ МЕЖДУНАРОДНЫЕ СОРЕВНОВАНИЯ ПО РОБОТОТЕХНИКЕ
Добро пожаловать на вторые открытые offline соревнования по робототехнике ! Данное соревнование проводится нами уже второй год подряд и мы будем впредь соблюдать эту традицию - каждый год, когда все робототехники приезжают с отпусков, начинают готовиться к 1 сентября, а кто-то к институту или вовсе к работе, наш сайт оживает. Новые идеи начинают литься рекой и наша задача помочь в их осуществлении. И мы хотим чтобы каждый год наши робототехники с нетерпением ждали этой даты.
В этот раз соревнование будет проводиться в 2-х возрастных категориях: 1 категория - до 15 лет; 2 категория - после 15 лет. Тем самым соревнование становится намного интереснее и захватывающе. Участникам предстоит побороться за I и II места(в каждой категории). А также за приз зрительских симпатий - ROboKIT набор для сборкиробота "Лайнтрейсер с памятью"
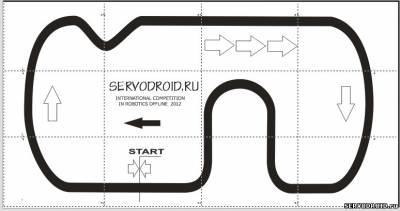
Участнику нужно распечатать трассу ( СКАЧАТЬ ТРАССУ ), собрать робота, снять видео с приемлемым качеством и заполнить анкету участника.
Возможно конкурсом заинтересовались ваши друзья или знакомые, пригласите их. Если они сами не станут участниками, то смогут поддержать вас морально или своим голосом.
ДАТА ПРОВЕДЕНИЯ
С 15.09.2012 - по 15.10.2012 - Прием заявок и работ участников
С 17.10.2012 - по 28.10.2012 - Отбор победителей,. Голосование
С 28.10.2012 - Награждение победителей. Закрытие соревнований.
Вконтакте - официальная страница соревнования
[hr][/hr]
ТЕХНИЧЕСКИЙ РЕГЛАМЕНТ
Требование к участнику
- участник должен заполнить анкету перед отправкой видео
- к анкете необходимо указать свои данные(ФИО, ДР)
- описать робота
- приложить архив с фотографиями робота
Требования к трассе:
- цвет полигона.................................белый
- цвет линии....................................черный
- ширина линии...................................20 мм
- размер всего трека..........12 листов А4 (3х4)
Правилами разрешен отступ по 5 мм от краев ! Если будет выявлено что эти размеры завышены, участник снимается с соревнования. Запрещается внесение изменений в геометрические размеры трассы!
Требование к видео:
- используйте камеры с высоким разрешением(желательно), чтобы на видео можно было различать все детали соревнования
- при съемке перед камерой обязательно наличие секундомера\таймера
- старайтесь не трясти камеру во время съемки
- заснятое видео должно быть отправлено организаторам
- участник выложивший видео в сеть Интернет для общего просмотра раньше срока снимается с соревнования
(!)Все видеоролики сначала обработают и проверят организаторы, после чего они будут загружены в сеть. После загрузки ролика в сеть допускается его распространение.
Конструкция робота:
- вес не ограничен
- источник питания напряжением не более 9 вольт
- кол-во фотоэлементов не ограничено
- максимальная ширина робота 30 см, длина - 30 см
- робот должен быть автономным.
Правила соблюдения масштаба
- размеры трека должны строго соответствовать заявленным размерам
- на одном из листов нанесена метка в которую необходимо поместить предмет, для визуального подтверждения соответствий трека с заявленными размерами
- организатор в праве отклонить попытку участника в случае нахождения несоответствий в размерах
- для соблюдения всех масштабов и о том как правильно распечатать трек ознакомьтесь с инструкцией
Правила отбора победителя:
- по достижению 00:00 все видеоролики будут загружены в сеть для публичного просмотра
- на прохождение дистанции каждой команде дается неограниченное количество попыток
- в зачет принимается лучшее время из попыток
- победителем будет объявлена команда, потратившая на преодоление дистанции наименьшее время.
- участникам, принимающим участие из-за границы мы предлагаем денежный приз в размере стоимости указанных призов
Приз зрительских симпатий
- имеет собственный денежный фонд, который формируют участники и гости конкурса
- является активным если набирает минимальную сумму денежных средств которые будут выделены участникам чей робот занимает 1 и 2 позиции в голосовании
- в случае превышения минимальной заявленной суммы фонда, могут быть предложены альтернативные призы
- является полностью добровольным
- имеет счет в WebMoney( для иностранных участников): USD Z198915130914; RU R212813377277
- имеет счет в ЯндексДеньги( для русскоязычных участников): 41001606676081
- счет может быть выбран любой на усмотрение желающего пополнить фонд
В случае равных результатов, победителем считается участник, первым предъявивший своего робота судьям.
ЭТАПЫ ФИКСАЦИИ ПРОХОЖДЕНИЯ РОБОТА НА ВИДЕО
1. Подготовьте трассу заранее.
2. Установите робота на стартовую линию (робот не должен пересекать линию)
3. Подготовьте таймер.
4. Включите камеру.
5. Установите линейку на шкалу с разметкой нанесенную на трассе. В камере должны быть отчетливо видны деления линейки и деления шкалы на бумаге. Удостоверившись что в камеру попали эти замеры вы можете начинать заезд.
6. Таймер должен быть виден перед камерой, держите его в руке (обязательно).
7. Таймер должен быть запущен в момент пересечения роботом стартовой полосы, и в выключен в тот же момент. Если у вас не хватает рук, чтобы одновременно держать видеокамеру, таймер, и включать робота, вы можете запустить робота раньше стартовой линии, а таймер запустить в момент пересечения роботом старта. Постарайтесь чтобы вам помог товарищ.
8. В заснятом видео в самом начале должна присутствовать надпись SERVODROID.RU - offline соревнование. А также время прохождения и автор.
9. Отправьте ваше видео по E-mail: melnik1412@yandex.ru с пометкой "SERVODROID.RU - offline соревнование. Автор. Время."
10. Монтаж видео начиная с 4 пункта этапа запрещен.
Награждение победителей:
В каждой возрастной группе отбираются по 2 призовых места (I и II), участники которых награждаются ценными призами от наших спонсоров.
Награждение осуществляется по итогам проведённых соревнований. Команда, чей робот проехал трассу за самое короткое время, назначается победителем и награждается призом.
Официальная страница соревнования.
 и файлы вроде все открытые сразу и выложено все удобно.
и файлы вроде все открытые сразу и выложено все удобно.