roboforum.ruТехнический форум по робототехнике. |
| Текущее время: 20 июн 2026, 12:58 |
roboforum.ruТехнический форум по робототехнике. |
| Текущее время: 20 июн 2026, 12:58 |
|
Часовой пояс: UTC + 4 часа |
 
|
Страница 1 из 2 |
[ Сообщений: 16 ] | На страницу 1, 2 След. |
|
| Автор | Сообщение | |||
|---|---|---|---|---|
| michey |
|
|||
|
Зарегистрирован: 27 окт 2009, 22:26 Сообщения: 12 Откуда: Санкт-Петербург прог. языки: C,C++,Turbo Pascal ФИО: Михайлов Александр Михайлович |
|
|||
| Вернуться к началу | ||||
| EdGull |
|
||||
Зарегистрирован: 28 дек 2004, 20:33 Сообщения: 10211 Откуда: Тольятти Skype: Ed_Gull прог. языки: Bascom AVR Basic ФИО: Гуль Эдуард Викторович |
|
||||
| Вернуться к началу | |||||
| michey |
|
|||
|
Зарегистрирован: 27 окт 2009, 22:26 Сообщения: 12 Откуда: Санкт-Петербург прог. языки: C,C++,Turbo Pascal ФИО: Михайлов Александр Михайлович |
|
|||
| Вернуться к началу | ||||
| galex1981 |
|
||||
Зарегистрирован: 04 дек 2008, 22:44 Сообщения: 4363 Откуда: Камышин Skype: galk-aleksandr1 прог. языки: Kotlin, Java, C, C++, Assm, BasCom, VB, php ФИО: Галкин Александр Владимирович |
|
||||
| Вернуться к началу | |||||
| michey |
|
|||
|
Зарегистрирован: 27 окт 2009, 22:26 Сообщения: 12 Откуда: Санкт-Петербург прог. языки: C,C++,Turbo Pascal ФИО: Михайлов Александр Михайлович |
|
|||
| Вернуться к началу | ||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
| michey |
|
|||
|
Зарегистрирован: 27 окт 2009, 22:26 Сообщения: 12 Откуда: Санкт-Петербург прог. языки: C,C++,Turbo Pascal ФИО: Михайлов Александр Михайлович |
|
|||
| Вернуться к началу | ||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
| michey |
|
|||
|
Зарегистрирован: 27 окт 2009, 22:26 Сообщения: 12 Откуда: Санкт-Петербург прог. языки: C,C++,Turbo Pascal ФИО: Михайлов Александр Михайлович |
|
|||
| Вернуться к началу | ||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
| michey |
|
|||
|
Зарегистрирован: 27 окт 2009, 22:26 Сообщения: 12 Откуда: Санкт-Петербург прог. языки: C,C++,Turbo Pascal ФИО: Михайлов Александр Михайлович |
|
|||
| Вернуться к началу | ||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
| michey |
|
|||
|
Зарегистрирован: 27 окт 2009, 22:26 Сообщения: 12 Откуда: Санкт-Петербург прог. языки: C,C++,Turbo Pascal ФИО: Михайлов Александр Михайлович |
|
|||
| Вернуться к началу | ||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
| michey |
|
|||
|
Зарегистрирован: 27 окт 2009, 22:26 Сообщения: 12 Откуда: Санкт-Петербург прог. языки: C,C++,Turbo Pascal ФИО: Михайлов Александр Михайлович |
|
|||
| Вернуться к началу | ||||
|
|
Страница 1 из 2 |
[ Сообщений: 16 ] | На страницу 1, 2 След. |
|
Часовой пояс: UTC + 4 часа |
Кто сейчас на конференции |
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 20 |
| Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения |
 имеющая переменный резистор(?)с нулевой точкой.Есть три вывода,один из них общий,допустим 2-ой,когда колеса стоят прямо,на обоих сопротивление бесконечное,когда колеса повернуты влево между 1и2(допустим)сопротивление равно нулю,когда направо - между 2и3.
имеющая переменный резистор(?)с нулевой точкой.Есть три вывода,один из них общий,допустим 2-ой,когда колеса стоят прямо,на обоих сопротивление бесконечное,когда колеса повернуты влево между 1и2(допустим)сопротивление равно нулю,когда направо - между 2и3.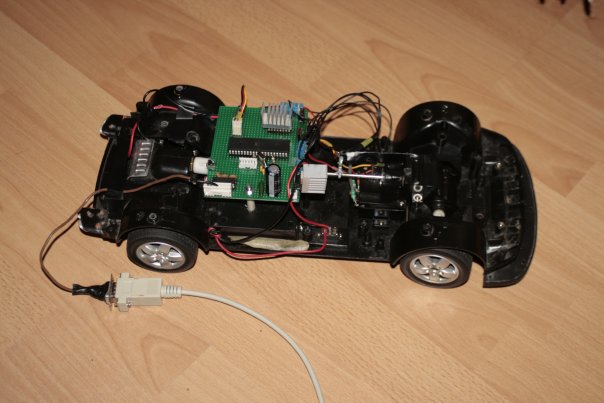



 .черная коробочка,два контакта - двигатель,три - резистор.внутри ничего техничнее дифференциалов нету.
.черная коробочка,два контакта - двигатель,три - резистор.внутри ничего техничнее дифференциалов нету.
