Хочу сделать робота-поливальщика, дабы во время отпуска было кому полить деревца.
Робот с управлением через интернет.
Представляю я его примерно так:
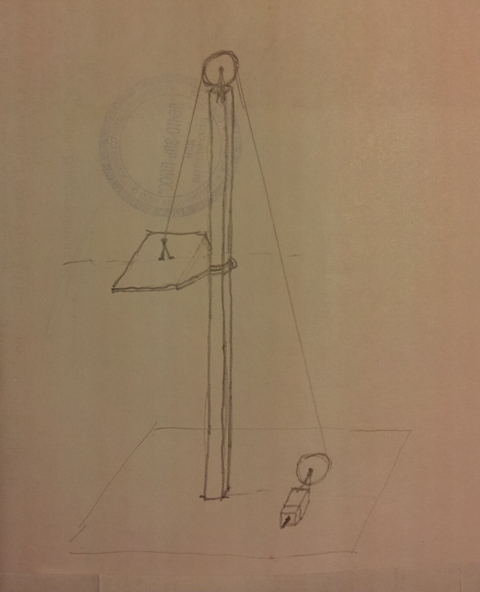
из чего состоит:
1. мозги = роутер TP-link MR3020.
он управляет двигателем на основании
2. Двигатель на основании поднимает/опускает платформу (по высоте)
На платформе находится
3. рукав (на рисунке нет)
4. двигатель выдвижения рукава по оси Х (на рисунке нет)
5. возможно, двигатель наклона рукава (на рисунке нет)
6. веб-камера (на рисунке нет)
7. от основания вдоль вертикальной штанги через платформу к концу рукава будет проложен водовод (возможно от медицинской капельницы)
8. водовод у основания присоединяется к насосу (возможно автомобильный от бачка омывателя)
9. в будущем предполагается основание сделать мобильным, т.е. будет ещё двигателей
Итак, предполагается до 4 нагрузок (три двигателя и один насос) и расширение в будущем + моб.основание.
Вопрос.
Какое нужно железо, чтобы это реализовать?
и вопросы конкретнее:
1. Двигатель у основания (видимо мотор-редуктор) - с каким моментом и частотой вращения необходим?
2. Какой драйвер нужен для двигателя по п.1?
3. Можно ли в этой схеме обойтись без дополнительных процессорных плат, с одним только роутером и драйверами двигателей?
С радостью приму прочие ценные замечания




 сколько каких горшков, как расположены и т.д.
сколько каких горшков, как расположены и т.д.
