Технический форум по робототехнике.
wirusoal » 09 дек 2012, 13:05
Я уверен многие новички захотевшие сделать робота под управлением нетбука или ноутбука задумывались каким способом это лучше сделать и я тоже этим задался.И так залепил 4 способа подключения нетбука к роботу.Хочу узнать вашего совета,а так же все + и - каждого способа.
Способ #1
Суть способа заключается просто в создании платформы на колесах на котором стоит ноут,ардуина,камера и прочие компоненты
Способ #2
Тут уже ноут идет отдельно,но уже появился роутер wifi и shield lan для для того,что бы с помощью беспроводной сети управлять роботом,а так же испытывать разные алгоритмы
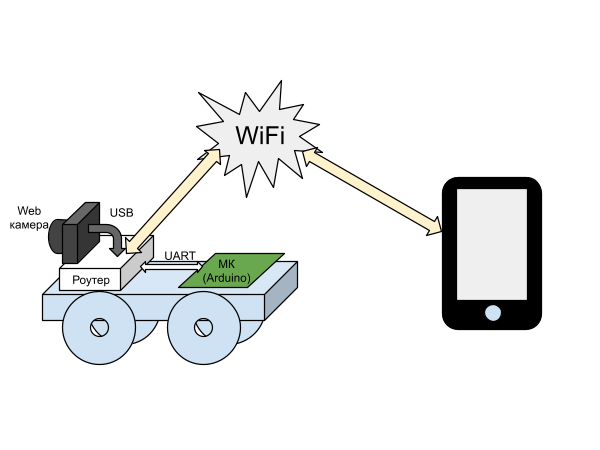
Способ #3
Ну,как видно,тут я предположил роутер соединить с ардуино с помощью usb кабеля и осуществлять управление,тестирование алгоритмов
Способ #4
И в последнем способе просто обойтись wifi shild-ом для ардуино,но тут встанет у меня вопрос как подключить веб камеру,а про управление понятно
С нетерпением жду ваши + и - по поводу этих способов
Последний раз редактировалось
wirusoal 10 дек 2012, 06:03, всего редактировалось 2 раз(а).
=DeaD= » 09 дек 2012, 13:12
А что, вам камера на роботе не нужна? Если нужна, то вэлкам сюда:
wiki/OR-WRT
elmot » 09 дек 2012, 13:16
Странные способы.
Самого прикольного-то и нету. На борту робота стоит перешитый роутер, связан по uart с микроконтроллером.
Ардуино эзернет-шилд - это хлам. Возможностем мизер, цена запредельная.
Так что не голосую пока.
wirusoal » 09 дек 2012, 15:47
elmot писал(а):Странные способы.
Самого прикольного-то и нету. На борту робота стоит перешитый роутер, связан по uart с микроконтроллером.
Ардуино эзернет-шилд - это хлам. Возможностем мизер, цена запредельная.
Так что не голосую пока.
Не,ну если для вас профессионала 100 levela это все кажется странным,то для меня,новичка,это пока что вполне нормальные способы с которыми я бы мог своими силами справиться
 Добавлено спустя 1 минуту 31 секунду:
Добавлено спустя 1 минуту 31 секунду:=DeaD= писал(а):А что, вам камера на роботе не нужна? Если нужна, то вэлкам сюда:
wiki/OR-WRT
Ясень пень,нужна,поэтому я в 4 способе и описал,что встает проблема с камерой

За ссылку огромное спасибо

AndreW82 » 10 дек 2012, 22:48
А мне вот такая схема больше нравится
elmot » 10 дек 2012, 23:04
Да, так тоже неплохо, но заметно дороже.
Kitam1n » 10 дек 2012, 23:06
Я как новичок для начала выбрал ноут на борту, посчитал это самым простым способом, легко соединяется через МК(в т.ч. через ардуину)с платформой. Ноут можно использовать как мозги, и тупо как приемник-передатчик для управления и передачи видео. Не нужно покупать доп. оборудование как роутеры и Wi-Fi-шилды. Сделаете это, понравится - можно подумать о том что бы снять с платформы ноутбук и поставить роутер, ноут освободится, платформа облегчится и перестанет боятся тряски...
Nesenin » 10 дек 2012, 23:25
ноут на борту это hi-end можно ставить ROS всякие ресурсоемкие сенсоры и другие плюшки.
вопрос в том что надо от робота?