Заголовок сообщения: Вопрос по Arduino mega + RAMPS 1.4
Добавлено: 21 сен 2018, 17:30
Зарегистрирован: 21 сен 2018, 16:48 Сообщения: 3
Добрый день! В наследство достался дельта-принтер без электроники. Решил восстановить его на arduino mega 2560 и ramps 1.4 + a4988 драйверах. Все конечно китайские копии. (Что принтер плохой знаю, воспринимаю как учебный проект, который если что не жалко запороть, а потом построю свой с блекджеком...)
Работать планирую через repeater host, поэтому использовать дисплей не планирую. Так же планирую печатать глиной, поэтому какие-либо нагревательные элементы мне вообще не нужны в принтере.
На текущий момент Подключил питание, подключил ramps к меге, поставил джамперы (по три штуки под каждым драйвером), поставил драйверы шд и подключил концевики. Прошил marlin. Воткнул резистор вместо термистора.
Но есть проблемы:
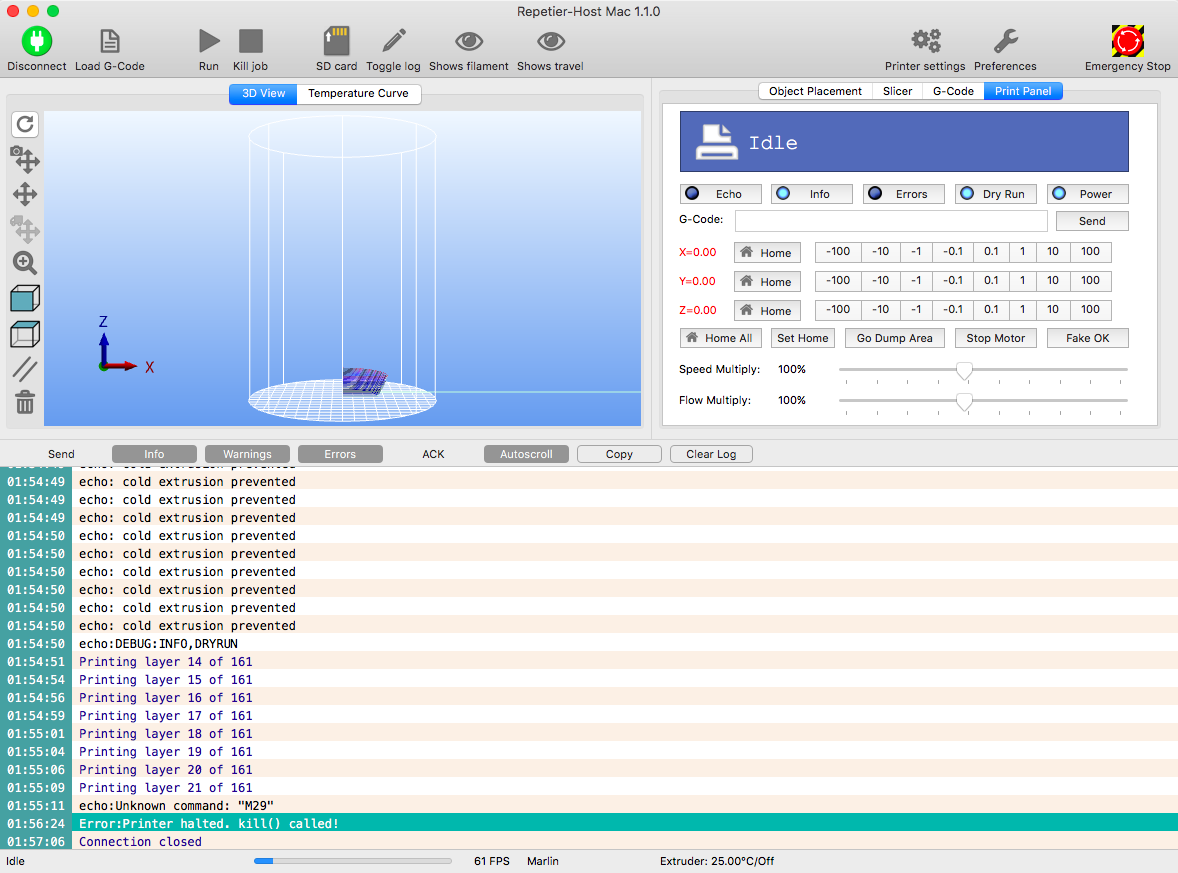
Подключась без проблем, "шлюз" открывается. 1) Если нажимаю home all, то двигатели начинают быстро крутиться и плата отключается в аварийном режиме Error:Printer halted. kill() called! На концевые выключатели не реагирует. Помогает только connect-disconnect. Беглое гугление говорит что такая ошибка частенько изза перегрева, но у меня вообще в марлине настроено на "виртуальные" 25 градусов. 2) Если нажать 100 или -100 по z. То двигатели ездят. Если по любой другой оси, то не реагируют. 3) Если запустить какой-то g-code, то опять же движение происходит только по Z и плата выполняет процентов 5 перемещений, а остальные как будто не успевает.
Вот видео:
Подскажите пожалуйста в какую сторону копать? (совсем новичок) Может я что-то очень базовое пропустил?
1. термистры можно вынуть а в прошивке поставить "заглушки" тип термистра 998 и 999 соответственно. 2. без home ездить не должно, точнее не далеко и только в + 3. вначале разобраться с концевиками ориентируясь на вывод команды M119 (http://marlinfw.org/docs/gcode/M119.html) возможно придется инвертировать логику концевиков (механика обычно ставится на в нормально замкнутом состоянии относительно массы, на логике включается подтяжка).
в теме по ссылке много информации, рекомендую посмотреть видео "Настройка концевиков, скоростей, ускорений и направлений движения." оно немного длинное и скучное (моя первая запись), зато подробно forum107/topic13287.html
Заголовок сообщения: Re: Вопрос по Arduino mega + RAMPS 1.4
Добавлено: 24 сен 2018, 14:39
Зарегистрирован: 21 сен 2018, 16:48 Сообщения: 3
Спасибо, Сергей! M119 очень помогла – я оказывается концевики подключил не _max а к _min. Переставил, зажал и заработало.
Поведение при этом всеравно странноватое. Home all срабатывавет только когда концевики уже зажаты. Если концевики сработают хоть на полсекунды позже чем нажат home all, то опять printer halted
если команда Home All (G28) срабатывает только при зажатых концевиках - значит подключено не верно. правильных варианта два: 1. если концевики пасивные (механика) то подключаем два проводка на "-" и "S" на плате и на нормально_замкнутые контакты концевика. и для пассивных концевиков нужно обязательно включить подтяжку
Код:
#define ENDSTOPPULLUPS
2. для активных концевиков подключаем все три провода - / S / + и выключаем подтяжку комментируя в конфиге двумя слешами
Код:
//#define ENDSTOPPULLUPS
после правильного подключения разбираемся с серией определений инвертирования сигналов:
Код:
#define X_MIN_ENDSTOP_INVERTING false ...
после правильного подключения и конфигурирования все концевики по команде M119 должны показывать Open а при нажатии что то другое (забыл используемые термины)
Добавлено спустя 6 минут 42 секунды: если будуте проверять руками без реальной механики - не забывайте что концевики используются дважды: сначала подход на большой скорости до срабатывания затем откат на небольшое расстояние и медленный подход на малой скорости
не забывайте что концевики используются дважды: сначала подход на большой скорости до срабатывания затем откат на небольшое расстояние и медленный подход на малой скорости
Подскажите, а если для оптического концевика отсутствует медленный подход на малой скорости - в чем может быть проблема? Откатился и там и остался, назад не подходит к концевику. А если опять на Хоме нажать, сразу откатывается, без подхода к концевику.
С помощью M119 я обнаружил, что после первого срабатывания концевика (после быстрого подхода) он остается TRIGGERED и не меняет своего состояния даже если его вручную закрывать/открывать. Почему - не могу понять. Изначально он был open, а после первого срабатывания его состояние не меняется - до перезагрузки.
UPD. Разобрался. Поигрался подтяжками, теперь все работает как надо.
_________________ Noname + Arduino + RAMPS 1.4 + Marlin (не понравился) Noname (CoreXY) + Duet2 WiFi v1.03 (MKS Clone) + 4 x (E3D V6 1,75 мм (боуден)) ToolChanger (в процессе эксплуатации)
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 41
Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения






 отлично!
отлично!