roboforum.ruТехнический форум по робототехнике. |
| Текущее время: 17 июн 2026, 16:29 |
roboforum.ruТехнический форум по робототехнике. |
| Текущее время: 17 июн 2026, 16:29 |
|
Часовой пояс: UTC + 4 часа |
 
|
Страница 2 из 2 |
[ Сообщений: 24 ] | На страницу Пред. 1, 2 |
|
| Автор | Сообщение | ||||
|---|---|---|---|---|---|
| vadinator |
|
||||
Зарегистрирован: 19 янв 2010, 14:51 Сообщения: 979 Откуда: Петрозаводск прог. языки: C, FBD, Wiring-Processimg,,,LD, SFC, ST... ФИО: Вадим |
|
||||
| Вернуться к началу | |||||
| PritMick |
|
|||
|
Зарегистрирован: 22 дек 2010, 12:06 Сообщения: 12 Откуда: Москва Skype: pritmix прог. языки: C, C++(из-за наличия STL :) ), Java ФИО: Михаил Притула |
|
|||
| Вернуться к началу | ||||
| AndreiSk |
|
||||
Зарегистрирован: 23 апр 2009, 17:03 Сообщения: 2639 Откуда: Москва, Самара прог. языки: C# |
|
||||
| Вернуться к началу | |||||
| vadinator |
|
||||
Зарегистрирован: 19 янв 2010, 14:51 Сообщения: 979 Откуда: Петрозаводск прог. языки: C, FBD, Wiring-Processimg,,,LD, SFC, ST... ФИО: Вадим |
|
||||
| Вернуться к началу | |||||
| PritMick |
|
|||
|
Зарегистрирован: 22 дек 2010, 12:06 Сообщения: 12 Откуда: Москва Skype: pritmix прог. языки: C, C++(из-за наличия STL :) ), Java ФИО: Михаил Притула |
|
|||
| Вернуться к началу | ||||
| RealRobot |
|
|||||
|
Зарегистрирован: 18 окт 2007, 23:46 Сообщения: 340 Откуда: Москва прог. языки: С++ , 1С :-) ФИО: Михаил |
|
|||||
| Вернуться к началу | ||||||
| PritMick |
|
|||
|
Зарегистрирован: 22 дек 2010, 12:06 Сообщения: 12 Откуда: Москва Skype: pritmix прог. языки: C, C++(из-за наличия STL :) ), Java ФИО: Михаил Притула |
|
|||
| Вернуться к началу | ||||
| Eruman |
|
||||
|
Зарегистрирован: 12 авг 2010, 15:10 Сообщения: 897 Откуда: Астраханская обл. |
|
||||
| Вернуться к началу | |||||
| PritMick |
|
|||
|
Зарегистрирован: 22 дек 2010, 12:06 Сообщения: 12 Откуда: Москва Skype: pritmix прог. языки: C, C++(из-за наличия STL :) ), Java ФИО: Михаил Притула |
|
|||
| Вернуться к началу | ||||
|
|
Страница 2 из 2 |
[ Сообщений: 24 ] | На страницу Пред. 1, 2 |
|
Часовой пояс: UTC + 4 часа |
Кто сейчас на конференции |
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 2 |
| Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения |

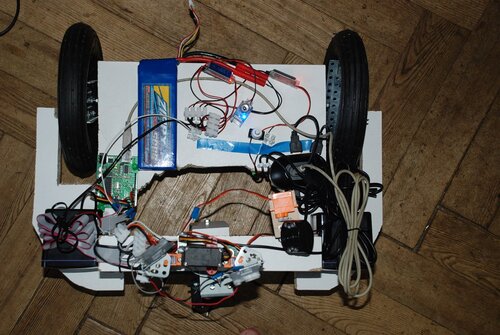
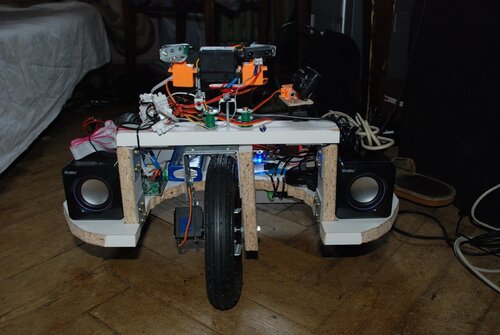
 А что за ОС используется и с чего грузится - с флешки?
А что за ОС используется и с чего грузится - с флешки?



 , а сюда я их залить не могу по причине отсутствия. Эти фотки Vooon делал. Верни ссылки, злыдень
, а сюда я их залить не могу по причине отсутствия. Эти фотки Vooon делал. Верни ссылки, злыдень 





{kind=link}