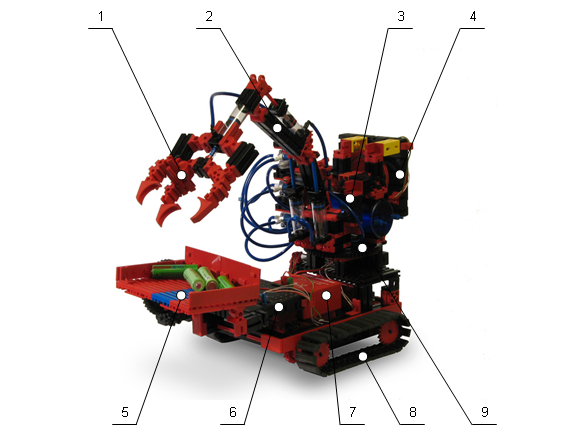
Робот «Чебурек-1» представляет собой гусеничную машину, способную двигаться по командам, подаваемым с простого пульта управления. Общий вид робота показан на следующей картинке:
Робот двигается по командам, которые подаются с пульта управления. Команды от пульта управления (джойстик-геймпад) поступают в ноутбук через интерфейс USB. В ноутбуке эти команды обрабатываются специальным программным обеспечением и передаются в бортовой контроллер робота через интерфейсы Bluetooth или USB. Специальное программное обеспечение выполняется на ноутбуке в среде графического программирования LabVIEW (демо версия с ограничением 30 дней).
Последний раз редактировалось ft-ninja 25 апр 2010, 15:16, всего редактировалось 1 раз.
я вот не понял, на этих евробот-соревнованиях, они кубики и пр. барахло с поля автоматом убирают или по команде человека извне? Ну вот кегельринг, или следование по линии, это робот сам делает, а в евроботе?
По правилам соревнований система управления обязательно должна быть связана с роботом электрическим кабелем . Вне соревнований конечно же, команды идут через bluetooth.
Евробот делится на две лиги. В младшей лиге роботы телеуправляемые. В старшей автономные. "Чебурек" выступал в младшей.
Добавлено спустя 8 минут 17 секунд:
pashteet писал(а):Интересно, что за конструктор использовался и какой контроллер?
Робот построен из деталей конструкторов fischertechnik. На борту у робота установлено два контроллера ROBO TX (тоже фишертехник).