| |
roboforum.ruТехнический форум по робототехнике. |
|
Робот-газонокосилка (РобоКос)
-

Duhas - Сообщения: 6338
- Зарегистрирован: 15 сен 2007, 13:03
- Откуда: Красноярск
- прог. языки: ASM(МК), C(PC)
- ФИО: Гагарский Андрей Александрович
Re: Робот-газонокосилка (РобоКос)
![]() yak-40 » 23 окт 2015, 13:38
yak-40 » 23 окт 2015, 13:38
Alex_Jet писал(а):а какой протокол Вы придумали?
Да протокол проще некуда)
Туда два байта, 1- команда 2- параметр. Например команда "вперед", параметр "50см".
Назад тоже два байта. 1- состояние датчиков (8 шт) 2- Напряжение бортовой сети (0-256)
Всё

-

yak-40 - Сообщения: 3037
- Зарегистрирован: 23 окт 2007, 22:03
- Откуда: Москва
- прог. языки: С
- ФИО: Евгений Яковец
Re: Робот-газонокосилка (РобоКос)
![]() 5m0 » 25 окт 2015, 12:09
5m0 » 25 окт 2015, 12:09
JohnnyFive писал(а)::shock: а где это мегу можно купить за 400 рубасов и литийжелезофосфат по 10 000 руб с зарядкой?
http://ru.aliexpress.com/item/Free-ship ... eb201560_9
ячейки для сборки акку.
http://ru.aliexpress.com/item/10pcs-Lif ... 27392.html
упс за 10000руб 24V10A с зарядкой не нашел
 придется самому собирать. или использовать ли ион за 9тыс
придется самому собирать. или использовать ли ион за 9тысhttp://ru.aliexpress.com/store/product/ ... 61806.html
- 5m0
- Сообщения: 29
- Зарегистрирован: 19 окт 2015, 17:15
- Откуда: Московская область
Re: Робот-газонокосилка (РобоКос)
![]() sned » 26 окт 2015, 17:56
sned » 26 окт 2015, 17:56
slom писал(а):Alex_Jet писал(а):
еще рассмотрите вариант контролера:
https://www.sparkfun.com/products/retired/12075
http://www.electronshik.ru/item/trex-controller-1269172
эта плата имеет на моторах мониторинг тока и прочие плюшки. может работать от 24 в и ток до 30 а при этом.
Какие то дикие все варианты.
Оптимально и дешево:
30A мини VNH2SP30 драйвер шагового двигателя монстр мото щит модуль для Arduino
например http://ru.aliexpress.com/item/Free-Ship ... eb201560_9
- sned
- Сообщения: 309
- Зарегистрирован: 08 апр 2013, 08:09
- Откуда: Екатеринбург
- ФИО: Сергей
Re: Робот-газонокосилка (РобоКос)
![]() Alex_Jet » 27 окт 2015, 10:59
Alex_Jet » 27 окт 2015, 10:59
Да, "30A мини VNH2SP30 драйвер шагового двигателя" я уже добавил в корзину - считаю хорошим вариантом (как по характеристикам, так и по ремонтопригодности). Правда двухканальных "не Arduino" - исполнения нет , либо стоит как крыло от самолета. Еще есть на L298 с токовой раскачкой - http://www.aliexpress.com/item/12-24V-7A-160W-2-L298-H-bridge-DC-Motor-drive-module-overcurrent-Optocoupler/32494537008.html.
Поскольку меня подвели с моторами для колес (хотел моторы ВАЗ-2110), то решил все же перейти на 24В. Нашел варианты моторов, ГУРУ оцените.
I. Для приводов колес:
1. Немного велика скорость для колес диаметром больше 200 мм, но, думаю, ШИМ выручит - http://www.aliexpress.com/item/2PC-NEW-DC-motor-DC-gear-motor-24V-90RPM-18-5W-25-8Kg-cm-for-Entertainment/2053125603.html
2. Еще на сайте http://www.tsinymotor.com/ нашел мотор TS-40GZ868-101, но пока не могу найти его в продаже.
II. Для двухмоторной косы:
1. http://www.aliexpress.com/item/1pcs-24V-40W-quiet-motor-permanent-magnet-DC-motor-DIY-small-production/32259413588.html
2. http://www.aliexpress.com/item/Auto-electronic-fan-motor-ultra-thin-12v24v80w-ball-bearing-lawn-mower-accessories/1225616204.html
3. Еще на сайте http://www.tsinymotor.com/ нашел мотор TRS-868SB-2450, но не могу найти его в продаже.
С российскими моторами как-то не хочется заморачиваться (качество изготовления низкое, цена того же порядка и прочее).
Вообще, анализируя предложения на рынке по робокосам, пришел к выводу что стоит отталкиваться от решений Frendly Robotics (в России - Robomow). Китайцы, думаю, также делают свои робокосы на основе того же Robomow RS630.
Так вот у Robomow двигатели косы очень мощные (по 200Вт и стоят ого) и управляются с помощью ШИМ. В режиме ECO крутиться сравнительно медленно и едет быстро, анализируя нагрузку на моторе косы, если трава густая (или не трава, а, например, яблоки и шишки, но в рамках токовой уставки), то поднимает обороты косы и едет медленнее. В общем большая мощность мотора косы нужна для большЕго крутящего момента. Да и моторы приводов колес хороши - позволяют снег перед бампером толкать (есть такое видео на forumhouse).
Самая большая проблема для самодельщика - найти нужные колеса (в нашем случае 240-280 мм), приводы к ним, а также шпиндели с площадками для ножей косы и приводы к этим шпинделям... (на ebay - стоимость пересылки съедает все желание), а лепить абы-как не согласен.
Сегодня поискал на тему колес и приводов. Нашел на ali (например, вот http://ru.aliexpress.com/item/10-inches-pneumatic-tires-motorcycle-toy-car-stroller-tires-Antiskid-damping-karting-tires/32277020268.html) в продаже колеса с приводами для детских автомобилей, правда все только на 12В максимум. В принципе готовое решение, однако бюджет нужен немного больший нежели чем я рассчитывал.
, либо стоит как крыло от самолета. Еще есть на L298 с токовой раскачкой - http://www.aliexpress.com/item/12-24V-7A-160W-2-L298-H-bridge-DC-Motor-drive-module-overcurrent-Optocoupler/32494537008.html.Поскольку меня подвели с моторами для колес (хотел моторы ВАЗ-2110), то решил все же перейти на 24В. Нашел варианты моторов, ГУРУ оцените.
I. Для приводов колес:
1. Немного велика скорость для колес диаметром больше 200 мм, но, думаю, ШИМ выручит - http://www.aliexpress.com/item/2PC-NEW-DC-motor-DC-gear-motor-24V-90RPM-18-5W-25-8Kg-cm-for-Entertainment/2053125603.html
2. Еще на сайте http://www.tsinymotor.com/ нашел мотор TS-40GZ868-101, но пока не могу найти его в продаже.
II. Для двухмоторной косы:
1. http://www.aliexpress.com/item/1pcs-24V-40W-quiet-motor-permanent-magnet-DC-motor-DIY-small-production/32259413588.html
2. http://www.aliexpress.com/item/Auto-electronic-fan-motor-ultra-thin-12v24v80w-ball-bearing-lawn-mower-accessories/1225616204.html
3. Еще на сайте http://www.tsinymotor.com/ нашел мотор TRS-868SB-2450, но не могу найти его в продаже.
С российскими моторами как-то не хочется заморачиваться (качество изготовления низкое, цена того же порядка и прочее).
Вообще, анализируя предложения на рынке по робокосам, пришел к выводу что стоит отталкиваться от решений Frendly Robotics (в России - Robomow). Китайцы, думаю, также делают свои робокосы на основе того же Robomow RS630.
Так вот у Robomow двигатели косы очень мощные (по 200Вт и стоят ого) и управляются с помощью ШИМ. В режиме ECO крутиться сравнительно медленно и едет быстро, анализируя нагрузку на моторе косы, если трава густая (или не трава, а, например, яблоки и шишки, но в рамках токовой уставки), то поднимает обороты косы и едет медленнее. В общем большая мощность мотора косы нужна для большЕго крутящего момента. Да и моторы приводов колес хороши - позволяют снег перед бампером толкать (есть такое видео на forumhouse).
Самая большая проблема для самодельщика - найти нужные колеса (в нашем случае 240-280 мм), приводы к ним, а также шпиндели с площадками для ножей косы и приводы к этим шпинделям... (на ebay - стоимость пересылки съедает все желание), а лепить абы-как не согласен.
Сегодня поискал на тему колес и приводов. Нашел на ali (например, вот http://ru.aliexpress.com/item/10-inches-pneumatic-tires-motorcycle-toy-car-stroller-tires-Antiskid-damping-karting-tires/32277020268.html) в продаже колеса с приводами для детских автомобилей, правда все только на 12В максимум. В принципе готовое решение, однако бюджет нужен немного больший нежели чем я рассчитывал.
- Alex_Jet
- Сообщения: 52
- Зарегистрирован: 24 фев 2010, 20:58
- Откуда: Томск
Re: Робот-газонокосилка (РобоКос)
![]() 5m0 » 27 окт 2015, 21:06
5m0 » 27 окт 2015, 21:06
Alex_Jet писал(а):Поскольку меня подвели с моторами для колес (хотел моторы ВАЗ-2110), то решил все же перейти на 24В. Нашел варианты моторов, ГУРУ оцените.
I. Для приводов колес:
1. Немного велика скорость для колес диаметром больше 200 мм, но, думаю, ШИМ выручит - http://www.aliexpress.com/item/2PC-NEW-DC-motor-DC-gear-motor-24V-90RPM-18-5W-25-8Kg-cm-for-Entertainment/2053125603.html
2. Еще на сайте http://www.tsinymotor.com/ нашел мотор TS-40GZ868-101, но пока не могу найти его в продаже.
II. Для двухмоторной косы:
1. http://www.aliexpress.com/item/1pcs-24V-40W-quiet-motor-permanent-magnet-DC-motor-DIY-small-production/32259413588.html
2. http://www.aliexpress.com/item/Auto-electronic-fan-motor-ultra-thin-12v24v80w-ball-bearing-lawn-mower-accessories/1225616204.html
3. Еще на сайте http://www.tsinymotor.com/ нашел мотор TRS-868SB-2450, но не могу найти его в продаже.
С российскими моторами как-то не хочется заморачиваться (качество изготовления низкое, цена того же порядка и прочее).
Я конечно не ГУРУ
 , но по мотору 1. скажу, что в самый раз скорость порядка 4-5км/час, несколькими постами раньше я писал о своем выборе - это привод стеклоочистителей камазовские мощность сопоставимая, можно взять от автобуса кому не хватит.
, но по мотору 1. скажу, что в самый раз скорость порядка 4-5км/час, несколькими постами раньше я писал о своем выборе - это привод стеклоочистителей камазовские мощность сопоставимая, можно взять от автобуса кому не хватит.по 2. скажу смотрите на мотор отопителя того же камаза, если мало мощности, смотрите для других грузовиков или автобусов там есть экземпляры и на 200Вт, но это влечет установку более емких (дорогих) акку.
Вот можно оценить вазовские моторы стеклоочистителей: http://geektimes.ru/post/261248/
- 5m0
- Сообщения: 29
- Зарегистрирован: 19 окт 2015, 17:15
- Откуда: Московская область
Re: Робот-газонокосилка (РобоКос)
![]() yak-40 » 28 окт 2015, 12:17
yak-40 » 28 окт 2015, 12:17
5m0 писал(а):Я конечно не ГУРУ , но по мотору 1. скажу, что в самый раз скорость порядка 4-5км/час
Да вы что! 5 км в час это же ~1,4 метра в секунду. Бешеная скорость для газонокосилки, тем более маломощной. 20 см в сек. самое оно. Проверено.
-
yak-40 - Сообщения: 3037
- Зарегистрирован: 23 окт 2007, 22:03
- Откуда: Москва
- прог. языки: С
- ФИО: Евгений Яковец
Re: Робот-газонокосилка (РобоКос)
![]() Alex_Jet » 28 окт 2015, 13:18
Alex_Jet » 28 окт 2015, 13:18
20 см/сек (0,72 км/ч) при колесах диаметром 26 см получаем 14,6 об/мин. Думаю это должна быть почти минимальная скорость робокоса для "прокоса" высокой и густой травы. Если обычный газон, то можно и быстрее. А полная скорость (при 24В под нагрузкой будет 70-80 об/мин) будет ~109 см/сек (3,94 км/ч) - для возврата на место парковки самое-то:) у меня участок 50х30 м. (правда "газон" на данный момент примерно 20х20 м).
Евгений (yak-40)! Какие видите минусы при работе такого двигателя при пониженном напряжении (ведь МК им будет с помощью ШИМ управлять)? Продавец пишет для RS555: [Подходящий напряжение] 3v6v12V-24V; [Скорость] 10-20-40-80 об/мин. Это обороты без нагрузки, поэтому вполне должно быть неплохо, правда ШИМ драйвер как себя будет вести?
Евгений (yak-40)! Какие видите минусы при работе такого двигателя при пониженном напряжении (ведь МК им будет с помощью ШИМ управлять)? Продавец пишет для RS555: [Подходящий напряжение] 3v6v12V-24V; [Скорость] 10-20-40-80 об/мин. Это обороты без нагрузки, поэтому вполне должно быть неплохо, правда ШИМ драйвер как себя будет вести?
- Alex_Jet
- Сообщения: 52
- Зарегистрирован: 24 фев 2010, 20:58
- Откуда: Томск
Re: Робот-газонокосилка (РобоКос)
![]() 5m0 » 28 окт 2015, 22:41
5m0 » 28 окт 2015, 22:41
yak-40 писал(а):5m0 писал(а):Я конечно не ГУРУ , но по мотору 1. скажу, что в самый раз скорость порядка 4-5км/час
Да вы что! 5 км в час это же ~1,4 метра в секунду. Бешеная скорость для газонокосилки, тем более маломощной. 20 см в сек. самое оно. Проверено.
Ну и отлично, значит мой выбор моторов-стеклоочистителей (35об/мин) оказался правильным. После ттх немцев (110об/мин), боялся что на камазовских слишком медленно будет ездить. Тогда и колеса можно будет поставить 175мм или все же 260мм лучше?
Вот перспективное направление https://youtu.be/N-vr_Gbhrq0
Режущий инструмент самый лучший. Можно купить в леруа недорого. Я такую приобрел, стригет отменно, но на густой траве нужно прилагать много усилий туда-сюда елозить, не хватае оборотов. Летняя эксплуатация этой газонокосилки и подтолкнула к роботостроению.
Моторизация привода ножей сказка
посмотрел видео обзавидовался. Весь мир в труху.- 5m0
- Сообщения: 29
- Зарегистрирован: 19 окт 2015, 17:15
- Откуда: Московская область
Re: Робот-газонокосилка (РобоКос)
![]() Alex_Jet » 29 окт 2015, 14:25
Alex_Jet » 29 окт 2015, 14:25
5m0 писал(а):Ну и отлично, значит мой выбор моторов-стеклоочистителей (35об/мин) оказался правильным. После ттх немцев (110об/мин), боялся что на камазовских слишком медленно будет ездить. Тогда и колеса можно будет поставить 175мм или все же 260мм лучше?
Какие приводы для колес будете использовать, ведь у вала камазовского редуктора все гораздо хуже чем у вазовского - шлицы под конусом! Из меня механик, видимо, плохой, поскольку для меня это головная боль.
Для низкооборотистых двигателей (кстати, какой там крутящий момент?), соответственно, нужны бОльшие колеса. При 260 мм максимальная скорость будет ~48 см/с!...долго будет на парковку ехать:)
- Alex_Jet
- Сообщения: 52
- Зарегистрирован: 24 фев 2010, 20:58
- Откуда: Томск
Re: Робот-газонокосилка (РобоКос)
![]() 5m0 » 29 окт 2015, 21:15
5m0 » 29 окт 2015, 21:15
Alex_Jet писал(а):Какие приводы для колес будете использовать, ведь у вала камазовского редуктора все гораздо хуже чем у вазовского - шлицы под конусом! Из меня механик, видимо, плохой, поскольку для меня это головная боль.
Для низкооборотистых двигателей (кстати, какой там крутящий момент?), соответственно, нужны бОльшие колеса. При 260 мм максимальная скорость будет ~48 см/с!...долго будет на парковку ехать:)
конкретно по камазовским не нашел.
вот вазовские:
ХАРАКТЕРИСТИКИ
Напряжение, В 12
Номинальная сила тока, А 3,2
Номинальная мощность, Вт 7,8
Пусковой вращающий момент, Нм 2
Рабочий вращающий момент, Нм 1,3
Номинальная частота вращение, min-1 70
Рекомендованная розничная цена 1 000 руб.
У этих 70 оборотов в мин, но думаю тише едешь, дальше будешь (качественнее постригаешь)
А моторы то подорожали на процентов 20-30..
- 5m0
- Сообщения: 29
- Зарегистрирован: 19 окт 2015, 17:15
- Откуда: Московская область
Re: Робот-газонокосилка (РобоКос)
![]() slom » 29 окт 2015, 22:03
slom » 29 окт 2015, 22:03
5m0 писал(а):Вот перспективное направление https://youtu.be/N-vr_Gbhrq0
Режущий инструмент самый лучший. Можно купить в леруа недорого. Я такую приобрел, стригет отменно, но на густой траве нужно прилагать много усилий туда-сюда елозить, не хватае оборотов. Летняя эксплуатация этой газонокосилки и подтолкнула к роботостроению.
Моторизация привода ножей сказка
Это не газоно косилка а машина смерти!
не дай бог под нож попадет ребенок или животное....
-

slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: Робот-газонокосилка (РобоКос)
![]() Alex_Jet » 29 окт 2015, 22:28
Alex_Jet » 29 окт 2015, 22:28
5m0 писал(а):конкретно по камазовским не нашел.
вот вазовские:
ХАРАКТЕРИСТИКИ
Напряжение, В 12
Номинальная сила тока, А 3,2
Номинальная мощность, Вт 7,8
Пусковой вращающий момент, Нм 2
Рабочий вращающий момент, Нм 1,3
Номинальная частота вращение, min-1 70
Рекомендованная розничная цена 1 000 руб.
У этих 70 оборотов в мин, но думаю тише едешь, дальше будешь (качественнее постригаешь)
А моторы то подорожали на процентов 20-30..
По камазовским тоже ничего не нашел. А параметры, которые привели - это вазовские более современные. Те которые использовал автор - 12В, 8Вт, 3Н/м при 65об/мин. В каком-то интернет-магазине находил их по 690-710р. Сейчас подорожало все!
- Alex_Jet
- Сообщения: 52
- Зарегистрирован: 24 фев 2010, 20:58
- Откуда: Томск
Re: Робот-газонокосилка (РобоКос)
![]() yak-40 » 31 окт 2015, 21:18
yak-40 » 31 окт 2015, 21:18
slom писал(а):Это не газоно косилка а машина смерти!
не дай бог под нож попадет ребенок или животное....
Тоже подумал об этом...
-
yak-40 - Сообщения: 3037
- Зарегистрирован: 23 окт 2007, 22:03
- Откуда: Москва
- прог. языки: С
- ФИО: Евгений Яковец
Re: Робот-газонокосилка (РобоКос)
![]() 5m0 » 09 ноя 2015, 08:08
5m0 » 09 ноя 2015, 08:08
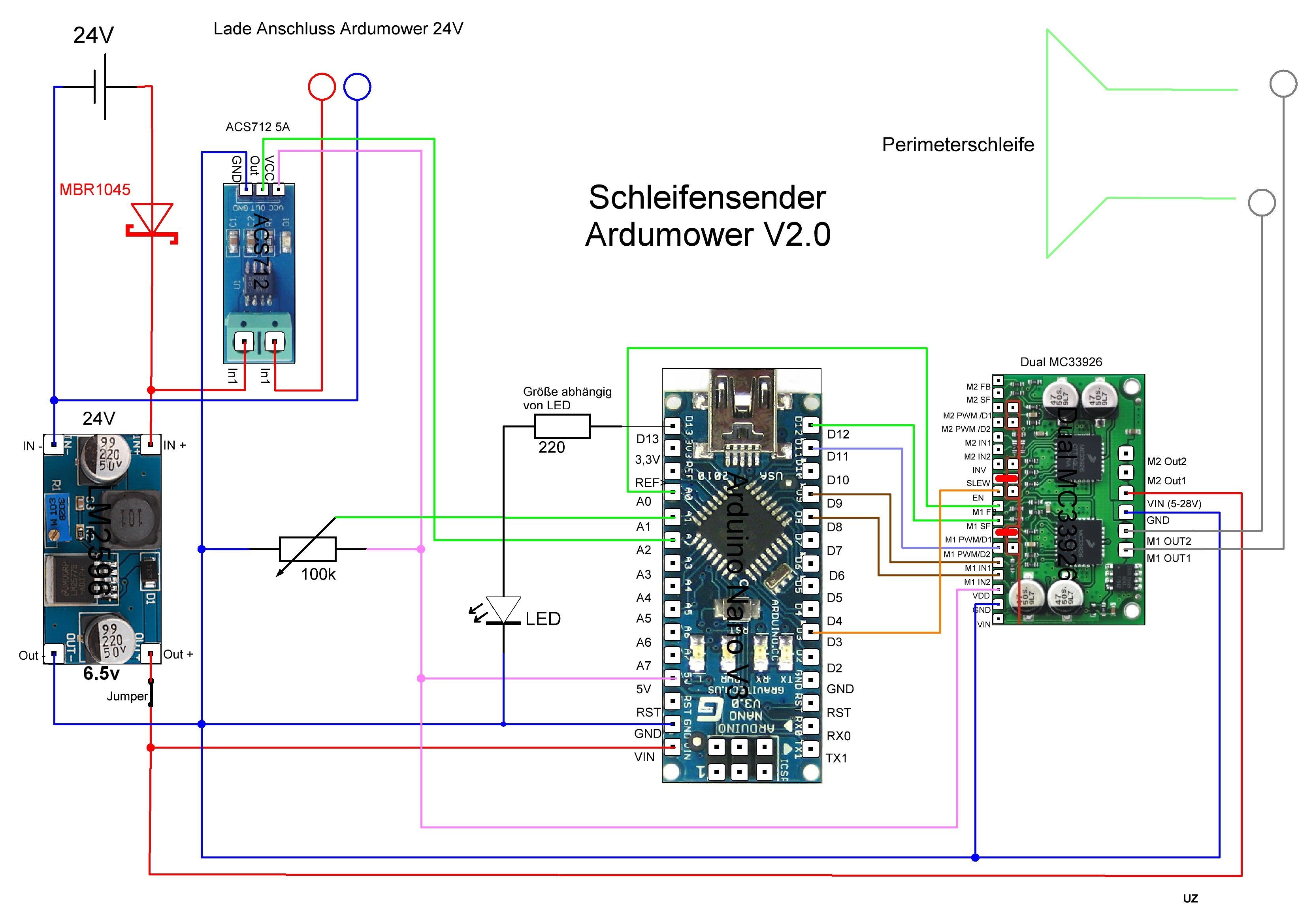
Ограничитель периметра. "Передатчик несущей".
По ссылке схема:
http://wiki.ardumower.de/images/6/6f/Sc ... wer_V2.JPG
Здесь описание:
http://wiki.ardumower.de/index.php?title=Perimeter_wire
Нужен мозговой штурм... чем заменить Dual MC33926 Motor Driver который стоит 2000руб? И что нужно поправить в коде?
Код можно скачать по ссылке (только sender) https://yadi.sk/d/PUbiBK2QkKTgY либо скачать полностью на http://www.ardumower.de/
Продолжение, вот что нашел сегодня вечером:
Вот в этом видео они тестируют "передатчик" https://www.youtube.com/watch?v=vg5Xg0__66A
в нем стандартный драйвер L298N
А вот кусок кода sender.ino
В общем запутался ;(
По ссылке схема:
http://wiki.ardumower.de/images/6/6f/Sc ... wer_V2.JPG
{kind=link}
Здесь описание:
http://wiki.ardumower.de/index.php?title=Perimeter_wire
Нужен мозговой штурм... чем заменить Dual MC33926 Motor Driver который стоит 2000руб? И что нужно поправить в коде?
Код можно скачать по ссылке (только sender) https://yadi.sk/d/PUbiBK2QkKTgY либо скачать полностью на http://www.ardumower.de/
Продолжение, вот что нашел сегодня вечером:
Вот в этом видео они тестируют "передатчик" https://www.youtube.com/watch?v=vg5Xg0__66A
в нем стандартный драйвер L298N
А вот кусок кода sender.ino
- Код: Выделить всё • Развернуть
// --- MC33926 motor driver ---
#define USE_DOUBLE_AMPLTIUDE 1 // uncomment to use +/- input voltage for amplitude (default),
// comment to use only +input/GND voltage for amplitude
#define pinIN1 9 // M1_IN1 (if using old L298N driver, connect this pin to L298N-IN1) !!! при использовании старый драйвер L298N, соединить этот вывод с L298N-IN1
#define pinIN2 2 // M1_IN2 (if using old L298N driver, connect this pin to L298N-IN2) !!! при использовании старый драйвер L298N, соединить этот вывод с L298N-IN2 ??? только выход8 NANO на схеме или я неправ?
#define pinPWM 3 // M1_PWM / nD2 (if using old L298N drivopener, leave ) ??? что с этим делать?
#define pinEnable 5 // EN (connect to motor driver enable) ??? что с этим делать?
// motor driver fault pin
#define pinFault 4 // M1_nSF ??? что с этим делать?
#define USE_PERI_FAULT 0 // use pinFault for driver fault detection? (set to '0' if not connected!)
// motor driver feedback pin (=perimeter open/close detection, used for status LED)
#define USE_PERI_CURRENT 1 // use pinFeedback for perimeter current measurements? (set to '0' if not connected!)
#define pinFeedback A0 // M1_FB ??? что с эти делать?
#define PERI_CURRENT_MIN 0.03 // minimum Ampere for perimeter-is-closed detection
В общем запутался ;(
Последний раз редактировалось 5m0 10 ноя 2015, 00:46, всего редактировалось 2 раз(а).
- 5m0
- Сообщения: 29
- Зарегистрирован: 19 окт 2015, 17:15
- Откуда: Московская область
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 6