Зарегистрирован: 23 май 2011, 01:02 Сообщения: 24 Откуда: Москва
прог. языки: C
ФИО: Алексей
Всем привет! Решил опубликовать свой долгострой, поскольку появились хоть какие-то результаты.
Дело было вечером, делать было нечего... Попал в ДТП, машина надолго в ремонте, скучно. Наткнулся на вот такой проект от Boston Dynamics:
И что-то подумалось, что ничего сложного в нем нет, крути моторами в нужную сторону да и все... Как же я ошибался
В итоге только спустя два года появилось условно пригодное изделие, которое все равно в виде макета. На самом деле, активных работ даже на месяц времени не накопилось, просто далеко не всегда было желание продолжать.
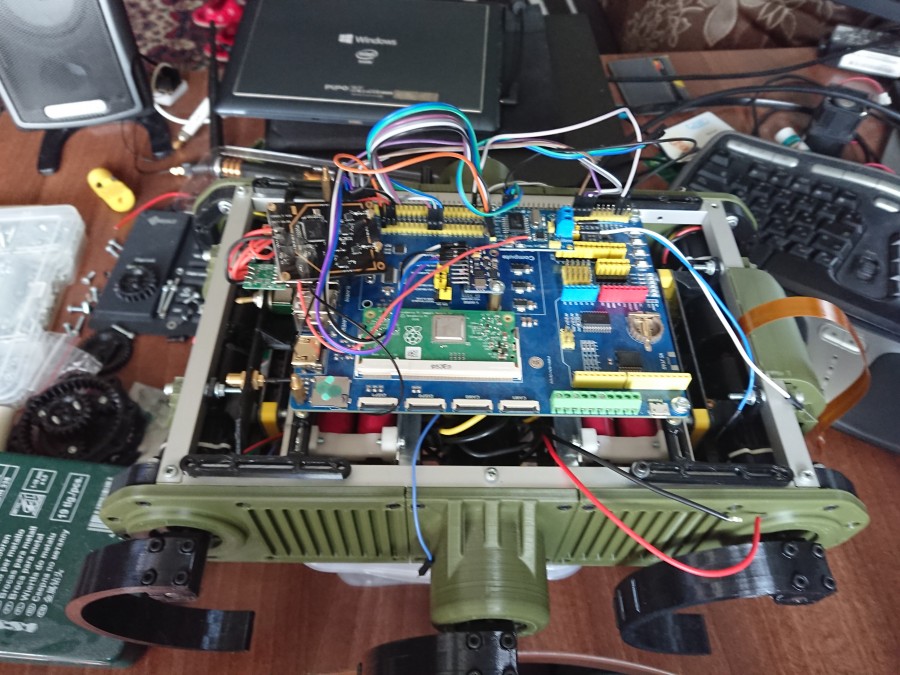
Управление оператором с использованием оборудования wifi но с особенным использованием стандарта 802.11. За основу взята кодовая база проекта OpenHD, случайно наткнулся на него. В качестве мозгов RaspberryPI CM3, планируется своя плата под нее, сейчас макетка. Все моторы управляются индивидуально, фактически превращены в сервоприводы - управление путем задания угла поворота и скорости его достижения (трехконтурный регулятор пока не осилил, самый простой ПИД там),
Зарегистрирован: 13 май 2011, 21:37 Сообщения: 3202 Откуда: Bb
Эх.. Столько работы, а идея применения не ясна мне. Это всё ради "побегать по травке"? По заголовку думал "это моя тема". Но нет. Не той системы граната(с). ..... Несколько лет витает мысль о подземном кроте-комбайне на гусеницах. Дому лет 200. Ремонт нужно быстро сделать. Полуподвал. С кротом можно былобы ещё этаж откопать для коньячных бочек. Не спеша. В режиме игры. Под уже залитым перекрытием.
Зарегистрирован: 23 май 2011, 01:02 Сообщения: 24 Откуда: Москва
прог. языки: C
ФИО: Алексей
ilalexey писал(а):
идея применения не ясна мне. Это всё ради "побегать по травке"?
У Вас какой-то слишком практичный взгляд. Если делать, то обязательно для полезного применения, все остальное непонятно зачем. Про травку - вообще первый раз из дома вынес, и то поломался. Под конец запутался в этой самой травке окончательно. Или предлагаете все макеты сразу в жесткую эксплуатацию?
Вообще в теории эта штука и плавать должна уметь, только корпус герметичный надо.
ilalexey писал(а):
Не спеша. В режиме игры. Под уже залитым перекрытием.
Кстати, управление можете взять такое же - там, в основном, летают, но всякие rover mode тоже допустимы.
Зарегистрирован: 13 май 2011, 21:37 Сообщения: 3202 Откуда: Bb
Amper91 писал(а):
У Вас какой-то слишком практичный взгляд. Если делать, то обязательно для полезного применения, все остальное непонятно зачем.
Угу. Извращенец я.
Amper91 писал(а):
Про травку..
Анекдот такой древний был: Бегает ежик по полю.Мимо проходит лось: -Ёжик,ты что здесь бегаешь? -Кайф ловлю. -Я с тобой. Бегают ежик и лось по полю,кайф ловят. Лось весь запыхался.Остановился и спрашивает ежа: -Ну и в чем здесь кайф? -А тебе разве травка пузик не щекочет?
Amper91 писал(а):
Кстати, управление можете взять такое же - там, в основном, летают, но всякие rover mode тоже допустимы.
Спасибо. Меня больше железная часть озадачивает. Нужно отрыть, просверлить, залить, замазать. С электроникой худо бедно понятно.
Зарегистрирован: 23 май 2011, 01:02 Сообщения: 24 Откуда: Москва
прог. языки: C
ФИО: Алексей
Крутить так, чтобы всегда опора на минимум трех ногах оставалась. Оказалось что проще засинхронизировать все моторы по оборотам, только добавлять индивидуальные смещения положения, в итоге образовалось условно две фазы - нижняя (опорная) и верхняя (переходная), обе занимают 50% времени, но по углу разные. На поворотах эти смещения несимметричные становятся. Общее количество совершенных оборотов всегда одинаковое получается для всех конечностей.
Зарегистрирован: 30 сен 2008, 18:49 Сообщения: 2702 Откуда: Где-то в Латинской Америке
Зверь машина! Проходимость супер. Только кажется, что электроники слишком много напихано. Автономные миссии планируются в будущем? Обход препятствий, GPS и прочее?
Зарегистрирован: 23 май 2011, 01:02 Сообщения: 24 Откуда: Москва
прог. языки: C
ФИО: Алексей
Автономность элементарно не осилю, хотя все к этому подготовлено. GPS есть (антенну надо компактную, сейчас автомобильная со шнуром трехметровым, поэтому снята), камера уже есть, датчики наклона/гироскопы/акселеромтры уже стоят.
Электроники не много, просто сейчас гигантская макетная плата сверху, она и развесовку портит.
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0
Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения