Holmes писал(а):
Angel71 писал(а):
l298, ляпотааа
Оценил)
А вообще у меня другой вопрос назревает: а не жалко 2 отдельных "всего" (питание, приемник и т.д.), ведь масса больше, расход энергии... И разряжаться будут не одновременно. Уж батарея то одна должна быть, и беспроводной модуль имхо один. Я на своем роботе привык экономить каждый миллиампер.
Нужно (поправьте если что не так):
- ездить - драйвер движков (имеется тирэкс, даже прошивка отлажена, я видел, вроде на 9 странице)
- стрелять из airsoft - один мосфет - один пин дуины
- поливать водой - один мосфет - второй пин дуины
- свет - если подобрать не сильно мощный светодиод, то можно прям от пина дуины без мосфета.
Итого нужно между приемником и тирэксом добавить дуину и написать скетч (могу помочь, не обещаю что быстро ибо надо работу работать).
оптимизация - всегда сложный процесс, а я вообще не программист, моих знаний хватает, взять что то готовое и слегка переделать.
насчет 2х систем питания и разного разряда батареи, то в этом есть свой плюс. что то одно сдохнет второе еще работает.
вот идейная схема того что я хотел от одного джойстика
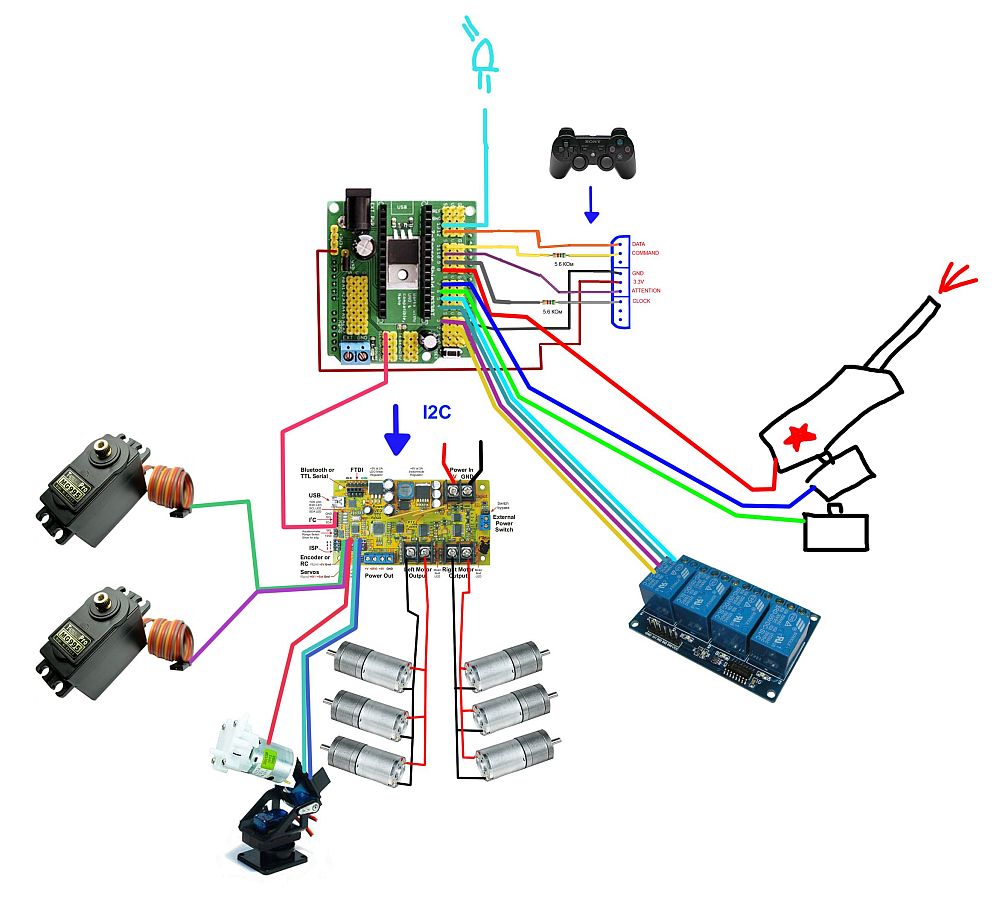
сейчас тоже самое только джойстиков 2
каждый джой требует 4х пинов от ардуино.
на тирексе их всего 6, тое сть подключив джойстик остаеться еще 2 для манипулятора(2 сервы)
на нано есть 14 пинов, 4 забираю под 2й джойстик, а далее
2 пина на сервы вращателя пушки
2 пина на вращатели водомета
2 пина на стрельбу с пушки и водомет(по 1му на каждое)
и еще 4 свободных пина под какие то мигалки - стрелялки




 феерично.
феерично.
 и такие драйверы для моторов, они не дорогие.
и такие драйверы для моторов, они не дорогие.

