Сделал полукопию радиуправляемого БТР-80 масштаба 1/6 Ключевые особенности: бортовая трансмиссия, электрически управляемая подвеска, гиростабилизация. ТТХ: ДхШхВ 1180x460x440мм (при максимальном клиренсе), колея 400мм Клиренс меняется от 0 до 80мм. (со слабыми пружинами) Вес: 21кг (из них корпус - 6 кг, шасси - 15 кг вместе с аккумуляторами) Питание: два 3s LiPo 6000mAh на моторы, два 2s LiPo 6000mAh на сервы.
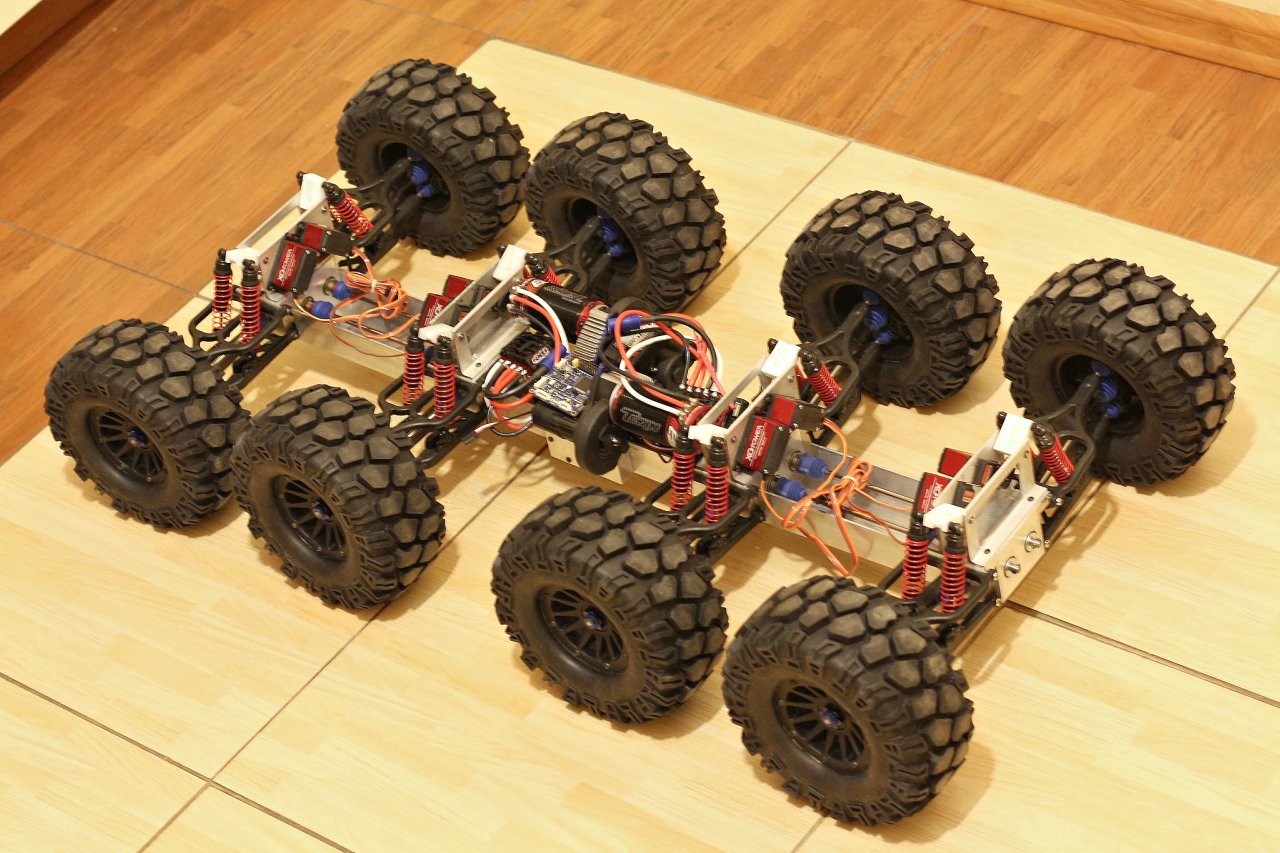
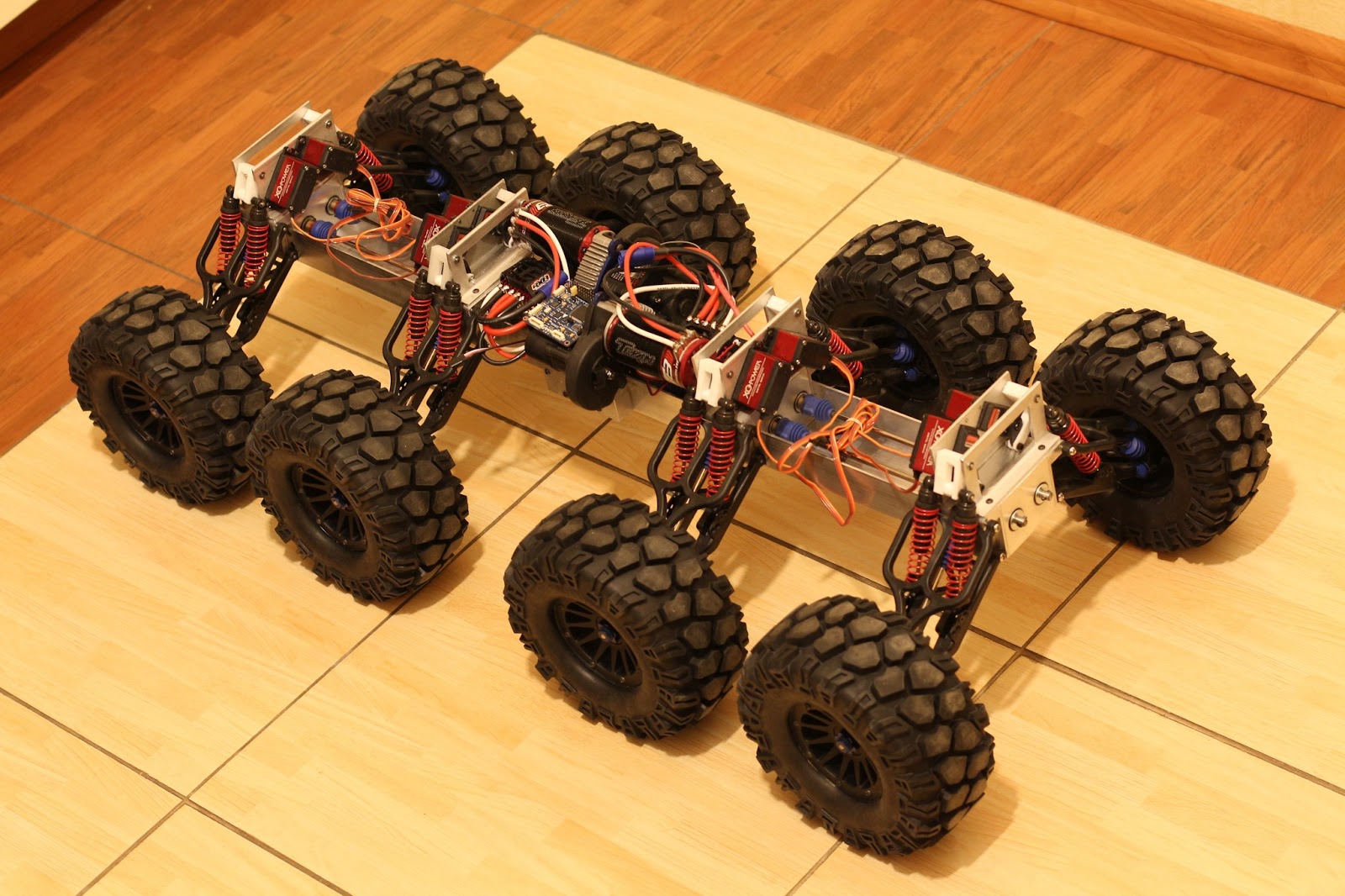
Модель в сборе Шасси Корпус стальной
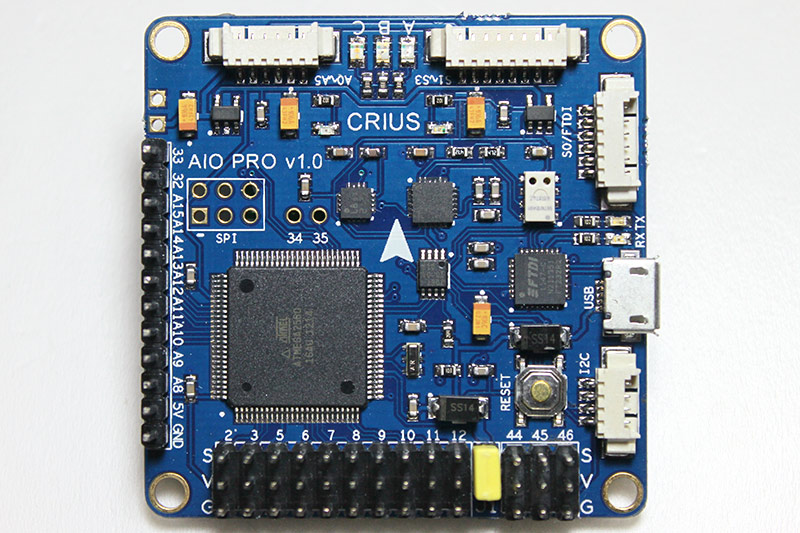
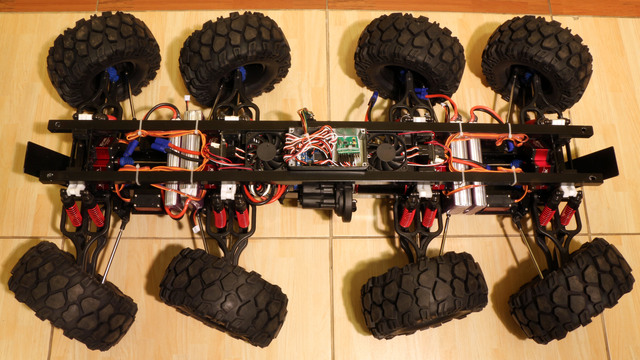
Все функции управления реализовал на квадрокоптерном контроллере CRIUS AIO Pro на контроллере Arduino Mega 2560 на базе кода Multiiwi 2.2. В контроллере много портов ввода/вывода и готовая трехосная гиро система. Контроллер находится в центре шасси сверху в герметичном алюминиевом корпусе, вместе с ним восьмиканальный приемник системы радиоуправления. Система радиоуправления восьмиканальная самолетная Turnigy 9x.
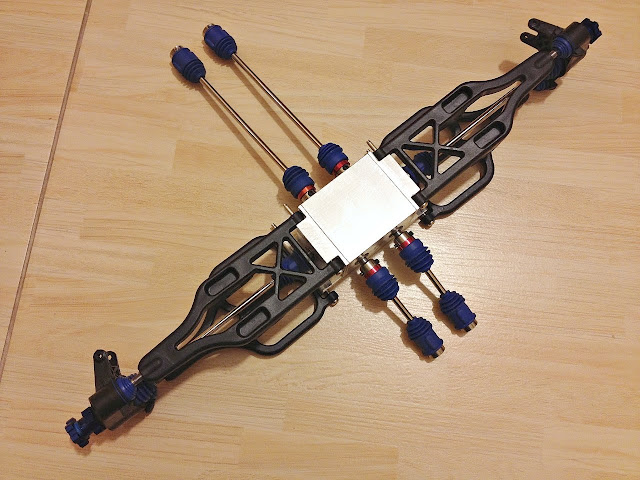
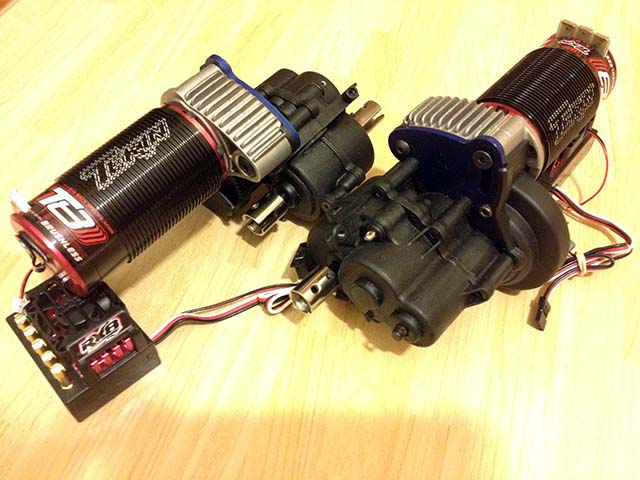
Многие элементы подвески и трансмиссии использовал готовые от внедорожников Traxxas Summit, E-Maxx. Рама, редукторы, управление клиренсом и рулями самодельные. Моторы левого и правого борта сенсорные бесколлекторные. Коробки передач двухскоростные.
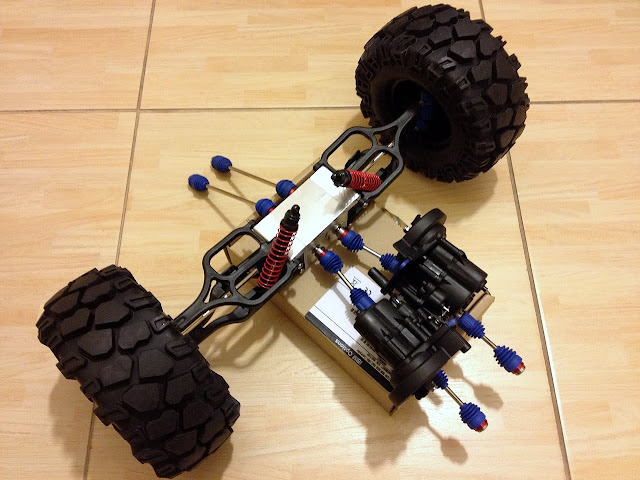
Подвеска колес с электрически изменяемым клиренсом. Каждое колесо соединено с шасси через пружину и масляный амортизатор, но не напрямую, а через рычаг с электроприводом. На каждое колесо используется свой канал управления. Это позволяет управлять не только вертикальный уровень, но и менять горизонт. Т.е. осуществлять продольную и поперечную устойчивость кузова.
В подвеске четыре режима: 1. Полностью отключенные сервоприводы. 2. Статическое управление клиренсом и горизонтом. 3. Прогрессивная поперечная стабилизация в поворотах (шасси накреняется внутрь поворота, как мотоцикл). 4. Гиростабилизация.
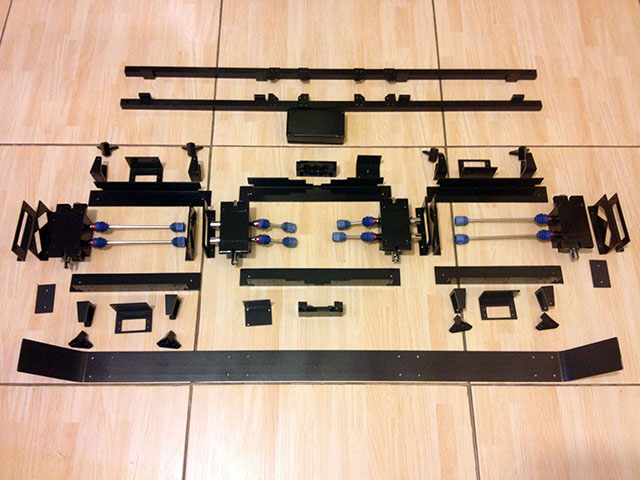
Минимальный клиренс Максимальный клиренс Самодельные детали после покраски
Проверка электроподвески
Рулевых механизма четыре. Все колеса поворотные. На один сервопривод подключено по два колеса, но не с левого и правого борта, как на классических машинах, а соседние по одному борту. Например переднее правое соединено со средним передним правым. Я сделал четыре режима рулевого управления: 1. Классическое - поворачивают только передние колеса. 2. Поворачивают передние и задние колеса, но задние зависят от скорости движения. Для повышения маневренности на малой скорости сильно поворачиваются, а на большой скорости практически не поворачиваются для повышения устойчивости. 3. Колеса фиксируются в среднем положении, руление осуществляется изменением момента в бортовой трансмиссии. 4. Дополняет третий вариант складыванием колес плугом для разворота на месте с меньшим трением.
Процесс сборки
Первая проверка на улице
Рассказ про основные особенности и игра на барабане (примерно на 9-ой минуте)
Сейчас планирую добавить в прошивку поддержку MIDI интерфейса и подключить к MIDI секвенсору на компьютере или MIDI клавиатуре. Лапы БТР поставлю на две педали бас бочки, хэта и ведущего барабана. Т.е. сделаю четырех канальную драм-Машину.
Заголовок сообщения: Re: Бронетранспортер БТР-80 барабанщик с MIDI интерфейсом
Добавлено: 11 дек 2013, 18:07
Зарегистрирован: 13 янв 2011, 15:25 Сообщения: 8033 Откуда: Санкт-Петербург
А сервы подвески программируются? Явно не нужна такая точность/режим отработки, а визг от их работы стоит жуткий. Я бы вообще перешил их с ppm на rs232. И доработал алгоритм (больше под параметрическое управление)
Красиво, но нехватает обратной связи вес/усилие на колесо, для адаптивного поведения подвески . Без ОУ ток на глаз подвеской управлять...на ети грабли я на хексаподе наступал.
Очень круто! Впечатляет. Сколько времени и средств ушло на разработку?
Времени ушло около года, проект не коммерческий - средства не считаю, чтобы не расстраиваться.
Dmitry__ писал(а):
А сервы подвески программируются? Явно не нужна такая точность/режим отработки, а визг от их работы стоит жуткий. Я бы вообще перешил их с ppm на rs232. И доработал алгоритм (больше под параметрическое управление)
Сервы не программируются - это самые дешевые сервы с титановыми редукторами и большим моментом, которые смог достать. Но с корпусом БТР масса получилась больше расчетной, пришлось поставить более мощные пружины и теперь проверяю другие сервы, а так же планирую изменить этот узел. Пока не понимаю смысла изменения интерфейса серв.
Aseris писал(а):
Красиво, но нехватает обратной связи вес/усилие на колесо, для адаптивного поведения подвески . Без ОУ ток на глаз подвеской управлять...на ети грабли я на хексаподе наступал.
Пока обратная связь только с гиро датчиков. Датчики усилия... надо бы изучить тему.
AndreiSk писал(а):
А какие цели то у устройства? Это просто Р.У. модель или робот какой будет?
Это наверное что-то среднее - Р.У. модель с задатками робота. Цель: как Р.У. модель например нравится моим детям на санках кататься, у меня просто академический интерес
leprud писал(а):
А сервоприводы, управляющие рычагами подвески напрямую к рычагам прикручены, без сервосейвера? Первый же камушек раздолбает редуктор сервы тогда
Невнимательно смотрели - сервопривоты подключены не к рычагам подвески, а к амортизатором, которые и выполняют функции сервосейверов. В нескольких сервах были бракованные шестерни - сам починил, но зубы у всех целы. Сейчас большая проблема это перегрев серв, не выдерживают они 6кг кузов.
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 1
Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения










 Впечатляет. Сколько времени и средств ушло на разработку?
Впечатляет. Сколько времени и средств ушло на разработку?

 . Без ОУ ток на глаз подвеской управлять...на ети грабли я на хексаподе наступал.
. Без ОУ ток на глаз подвеской управлять...на ети грабли я на хексаподе наступал.


