Строю сейчас гусеничные платформы. Начал с ГРАМАДЫ.
Управление от 6-ти командного ПДУ.
Далее с Малаховым Иваном сделали гусеничного Сапера.
Добавлено спустя 4 минуты 47 секунд:Гусеничный робот Сапер.

Видео с его похождениями я, вроде, выставлял.
Добавлено спустя 6 минут 32 секунды:Он закончен.
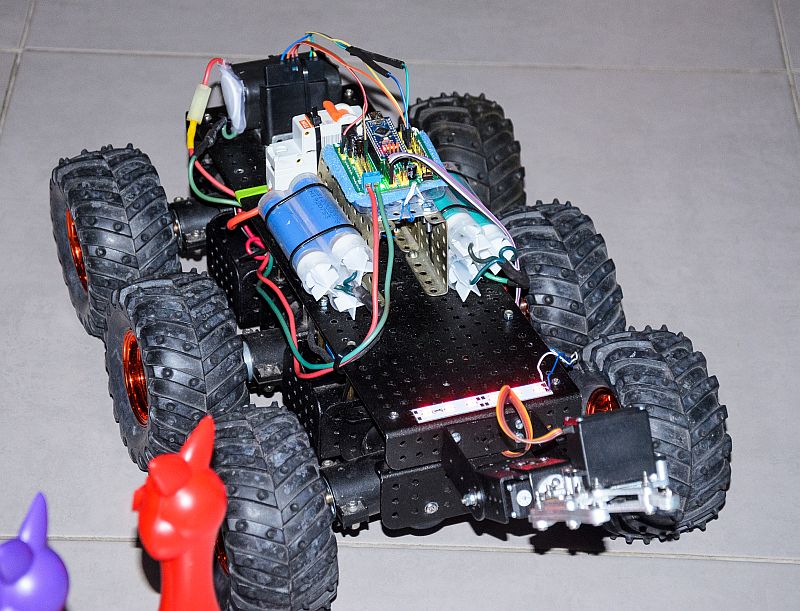
Сейчас работаем над Танкеткой. На ходу уже испытывали. В стадии завершения.
Фото выставлю чуть позже. Не решили, что использовать в качестве сенсоров - УЗ или ИК. Или поставить оба.
Добавлено спустя 17 минут 41 секунду:Начал работу над Амфибией. Планирую сделать ее 2-х корпусной. Плавающей.
Покажу этапы работы над этим роботом. Может кому-нибуть будет полезно.
Материал для корпусов взял от списанных компьютеров.
Добавлено спустя 3 минуты 27 секунд:
Далее разметил.
Добавлено спустя 3 минуты 9 секунд: Добавлено спустя 2 минуты 43 секунды:
Добавлено спустя 2 минуты 43 секунды:Вырезал болгаркой.
 Добавлено спустя 4 минуты 23 секунды:
Добавлено спустя 4 минуты 23 секунды:Проклеил поверхности соприкосновения толстым двусторонним скотчем, согнул и закрепил винтами М3.
 Добавлено спустя 5 минут 23 секунды:
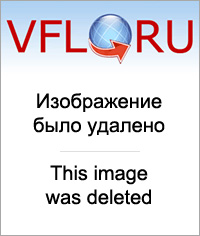
Добавлено спустя 5 минут 23 секунды:Соединять корпуса буду через ЦПУ (центральный пружинный узел).
Вот эскиз.
 Добавлено спустя 4 минуты 22 секунды:
Добавлено спустя 4 минуты 22 секунды:Начало работы над корпусами.
 Добавлено спустя 2 минуты 11 секунд:
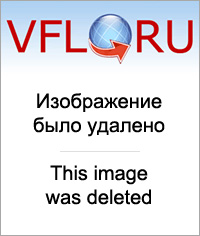
Добавлено спустя 2 минуты 11 секунд:Установка гусениц.
 Добавлено спустя 2 минуты 14 секунд:
Добавлено спустя 2 минуты 14 секунд:Первый корпус вчерне готов.
 Добавлено спустя 4 минуты 17 секунд:
Добавлено спустя 4 минуты 17 секунд:Опорные катки (желтые) самодельные. Из крышек от яблочного сока. Возня, конечно, но зато бесплатно.