Этот проект получил название SimpleBot, так как его целью является создание максимально функционального робота с минимальными затратами времени и оптимальными затратами средств.
Какие нужны навыки:
-Умение держать отвертку.
-Минимальные знания о электрических цепях, или хотя бы о законе Ома.
-Программирование микроконтроллеров.-Понятие о программировании(переменных, операторах, функциях).
-Если хотим чтобы, все было красиво и надежно – умение спаять вместе два проводка.
Теперь кратко расскажу о проекте, а затем подробнее о всех его составляющих.
Робот представляет собой гусеничное шасси, приводимое в движение сдвоенным мотор-редуктором. Размеры - 25х15х15см. Двигатели управляются драйвером L293D. Драйвер управляется контроллером Arduino Nano (Китай). Элементы питания – 4 последовательно соединенных NiMh аккумулятора по 2600mAh каждый. Предусматривается 2 основных режима работы: беспроводное управление человеком по Bluetooth, и свободное блуждание. Датчик препятствия – ультразвуковой сонар. В будущем планируется развитие до стереовидения. Также есть идея кругового обнаружения препятствий путем размещения сонара на серве.
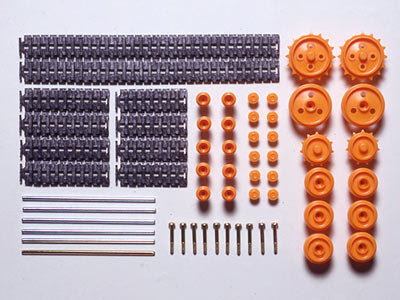
Ходовая состоит из набора Tamiya 70100 Track & Wheel Set и платы Tamiya 70098 Universal Plate. Пластик не имеет ни запаха ни вкуса

Качество просто на высоте. Гусеницы состоят из частей разной длинны и надежно стыкуются, позволяя строить самые разнообразные конструкции.

Мотор-редукторы Tamiya 70168 Double Gearbox:

поставляются разобранными:
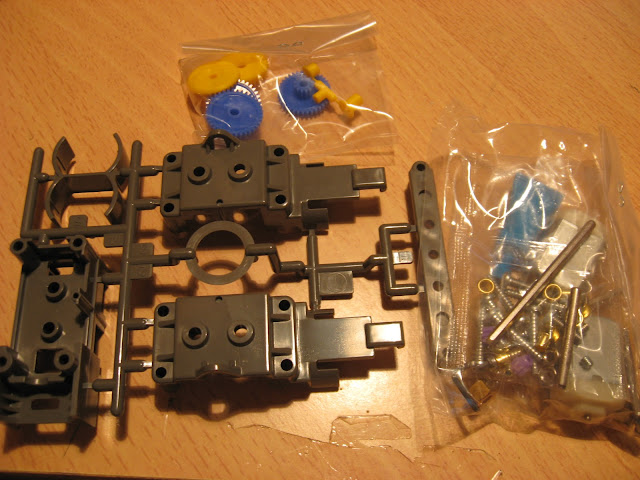
их сборка - довольно увлекательное занятие, благо есть довольно подробная инструкция. Шестерни пластиковые, валы металлические. Валы в отверстиях корпуса крепятся, через втулки из мягкого металла, которые играют роль подшипников. Еще в комплекте есть тюбик со смазкой, но ее как-то немного...
На выбор имеется четыре варианта сборки, и соответственно четыре варианта передаточных отношений: 12.7:1, 38.2:1, 114.7:1, 344.2:1
Я остановился на 114.7:1
Моторы - FA-130, 3В, номинальная нагрузка 600mA. Во время испытаний пустой платформы - 500mA на оба.
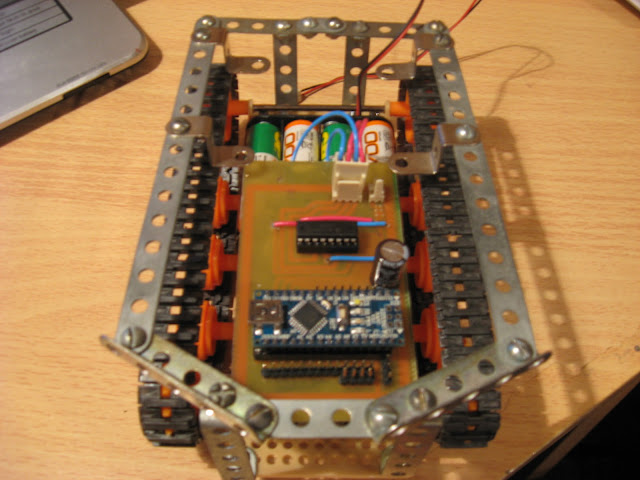
Я решил разместить Ардуино и драйвер двигателей на одной плате, в итоге получилось вот что:

Ну и вся конструкция на данный момент:


Напряжение в сети, на заряженных аккумах - 5.3В, но ардуина себя нормально чувствует и при 4.5
Движки плавно разгоняю и торможу подавая ШИМ на L293D. За несколько минут испытательной езды, драйвер едва теплый.
Очень помог металлический конструктор. На раме будет монтироваться навесное оборудование.
Блютуз передатчики идут по почте, так что пока буду делать автономный режим.
Следующий шаг - установка неподвижного сонара HC-SR04 в передней части.

На столе сонар показал отличный результат. Пол не ловит при подъеме на 10см. Для фильтрации случайных помех, программно меряю расстояние 5 раз и беру среднее арифметическое. Хотя заявленная дальность действия 50см, по факту определяет препятствие на 80-100см.
На этом пока все. Продолжу писать после установки сонара, и реализации алгоритма "Свободного блуждания".
Стоимость платформы на данный момент:
Tamiya 70098 Universal Plate - 5.00$
Tamiya 70100 Track & Wheel Set -9.30$
Tamiya 70168 Double Gearbox - 9.30$
Arduino Nano - 16.90$
HC-SR04 - 12$
Arduino Bluetooth Module - 10$
Доставка ~ 10$
Итого: 72$ или 580грн или 2300руб



