roboforum.ruТехнический форум по робототехнике. |
| Текущее время: 21 июн 2026, 18:05 |
roboforum.ruТехнический форум по робототехнике. |
| Текущее время: 21 июн 2026, 18:05 |
|
Часовой пояс: UTC + 4 часа |
 
|
Страница 1 из 2 |
[ Сообщений: 29 ] | На страницу 1, 2 След. |
|
| Автор | Сообщение | |||
|---|---|---|---|---|
| andreynech |
|
|||
|
Зарегистрирован: 06 сен 2011, 17:17 Сообщения: 40 Откуда: Харьков, Украина. ФИО: Андрей |
|
|||
| Вернуться к началу | ||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
| Grem |
|
||||
Зарегистрирован: 16 май 2009, 12:50 Сообщения: 1530 Откуда: Россия прог. языки: Java, C |
|
||||
| Вернуться к началу | |||||
| andreynech |
|
|||
|
Зарегистрирован: 06 сен 2011, 17:17 Сообщения: 40 Откуда: Харьков, Украина. ФИО: Андрей |
|
|||
| Вернуться к началу | ||||
| Grem |
|
||||
Зарегистрирован: 16 май 2009, 12:50 Сообщения: 1530 Откуда: Россия прог. языки: Java, C |
|
||||
| Вернуться к началу | |||||
| andreynech |
|
|||
|
Зарегистрирован: 06 сен 2011, 17:17 Сообщения: 40 Откуда: Харьков, Украина. ФИО: Андрей |
|
|||
| Вернуться к началу | ||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
| andreynech |
|
|||
|
Зарегистрирован: 06 сен 2011, 17:17 Сообщения: 40 Откуда: Харьков, Украина. ФИО: Андрей |
|
|||
| Вернуться к началу | ||||
| =DeaD= |
|
||||
Зарегистрирован: 06 окт 2004, 18:01 Сообщения: 24218 Откуда: Ебург прог. языки: C++ / PHP / 1C ФИО: Антон Ботов |
|
||||
| Вернуться к началу | |||||
| noonv |
|
||||
Зарегистрирован: 21 май 2007, 22:57 Сообщения: 600 Откуда: Калининград прог. языки: C++ |
|
||||
| Вернуться к началу | |||||
| andreynech |
|
|||
|
Зарегистрирован: 06 сен 2011, 17:17 Сообщения: 40 Откуда: Харьков, Украина. ФИО: Андрей |
|
|||
| Вернуться к началу | ||||
| Angel71 |
|
||||
Зарегистрирован: 18 апр 2009, 22:18 Сообщения: 10668 |
|
||||
| Вернуться к началу | |||||
| andreynech |
|
|||
|
Зарегистрирован: 06 сен 2011, 17:17 Сообщения: 40 Откуда: Харьков, Украина. ФИО: Андрей |
|
|||
| Вернуться к началу | ||||
| andreynech |
|
|||
|
Зарегистрирован: 06 сен 2011, 17:17 Сообщения: 40 Откуда: Харьков, Украина. ФИО: Андрей |
|
|||
| Вернуться к началу | ||||
| Nesenin |
|
||||
Зарегистрирован: 26 янв 2012, 03:59 Сообщения: 1345 Откуда: Казань прог. языки: LabVIEW ФИО: Никита Есенин |
|
||||
| Вернуться к началу | |||||
|
|
Страница 1 из 2 |
[ Сообщений: 29 ] | На страницу 1, 2 След. |
|
Часовой пояс: UTC + 4 часа |
Кто сейчас на конференции |
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0 |
| Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения |
 , не закончена но на мой взгляд достаточна для того, чтобы понять и даже повторить сделанное.
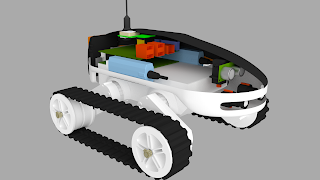
, не закончена но на мой взгляд достаточна для того, чтобы понять и даже повторить сделанное. 


 . Но в глаза ничего особенного не бросилось... наверно как-то его помехи стороной обходят
. Но в глаза ничего особенного не бросилось... наверно как-то его помехи стороной обходят  ) вроде правильно показывает. Но теперь я попробую поточней проверить. Спасибо за совет!
) вроде правильно показывает. Но теперь я попробую поточней проверить. Спасибо за совет!