Добавил к сделанным ранее блокам мотор-редукторов энкодеры.
 Просмотров: 7794")
- Мотор-редуктор версии 1
Безуспешно попробовал готовые уже датчики настроить на бумажное кольцо с полосками, потом пробовал красить зубчика самого колеса. Затем решил использовать энкодеры от шариковой мышки.
В пластмассовой оси колеса энкодера просверлил отверстие диаметром равным диаметру оси колеса с мотором - зажал в цанге дрели (электроотвертки, на самом деле) ось энкодера и зажатым плоскогубцами сверлом ровненько высверлил отверстие. Пластмасса очень прочная - не крожится и не колется.

- Сверление отверстия в оси энкодера
- MouseEncoder1.jpg (15.92 КиБ) Просмотров: 11861
Выпилил пары светодиод-фототранзистор. Опытным путем (тестером) определил где-что у светодиода (он прозрачный), затем у фототранзистора (он черный и там их два, средний вывод - общий). Припаял провод со стандартным разъемом, подключил к Миниботу и с помощью тестовой программы мигающей светодиодами проверил как работает пересечение светового потока - пришлось уменьшить площать светодиода, обернув его черной изолентой с маленьким отверстием для линзы (маленький бугорок, направленный на фототранзистор).
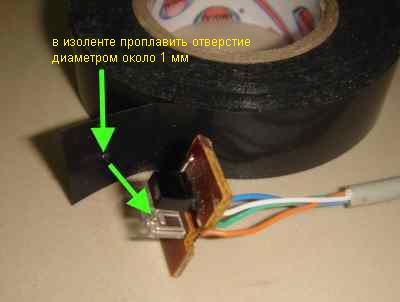
- Заклеивание фотодиода черной изолентой с отверстием для линзы
- MouseEncoder2.jpg (23.18 КиБ) Просмотров: 8852
Расположил оптический блок глядя на индикацию тестовой программы (хорошо бы специальные светодиоды для этого иметь) и закрепил термоклеем.
 Просмотров: 7808")
- Установленный энкодер
Конечно правильно бы это все закрыть корпусом.
Добавлено спустя 5 минут 12 секунд:Выявленные недостатки конструкции:
провода питания торчат в стороны - либо нужно напрваить разъемы вверх, либо найти угловые (что вряд-ли)
провода датчиков все-же желательно иметь помягче - тоже торчат вперед.
телефонный разъемы могут подключиться не до конца - без специальной индикации не будет заметно.






 У разъемов питания разрезал под 45 градусов черный пластик, повернул - получился угол. Залил клеем. Теперь не порчит в стороны.
У разъемов питания разрезал под 45 градусов черный пластик, повернул - получился угол. Залил клеем. Теперь не порчит в стороны.
