То нужно выбрать кто из них будет мастер.
На втором модуле снять перемычки UART.
После чего второй будет иметь адрес fe (ff).
Обращаться ко второму можно только I2C командами.
Вот только не помню работают ли прошивки 0.8 в режиме слейва,
возможно что не получится.
На 0.9 точно работает, тестировал, но порт на M32-D не доделан.
Там не работает servo. Переход на интерфейс SSC32 потребовал от servo hal приход за время, а на M32-D установка положения сильно тормозит.
Вот это и не дает зарелизить 0.9.
К сожалению у меня сейчас на это не хватает времени (да и блуждают мысли в порыве NIH**2 написать ORFA2 для Cortex-M3).
| |
roboforum.ruТехнический форум по робототехнике. |
|
Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() Vooon » 18 июн 2011, 02:01
Vooon » 18 июн 2011, 02:01
-

Vooon - Site Admin
- Сообщения: 3339
- Зарегистрирован: 09 фев 2006, 15:36
- Откуда: Москва
- Skype: vooon341
- прог. языки: Python, C, Bash, JavaScript, C++, PHP
- ФИО: Владимир Ермаков
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() MaPTbIH » 27 июл 2011, 22:31
MaPTbIH » 27 июл 2011, 22:31
Всем день добрый.
Первое, что не хватает, это полного списка комплектующих для проекта. Я сейчас имею в виду страничку с OR-LT-v2. Ведь там нет программатора. Да я понимаю, что это логично, но для новичка или чайника это не очевидно. Можно сделать после "прочих компонентов" категорию "Смотрите также", где будет OR-PROG-USB - программатор от OR-команды, без него вы не сможете перепрошить(изменить программу) вашего робота; OR-USB-UART - модуль для общения и отладки с вашим контроллером OR-AVR-M32-D.
Второе, как заметили выше, пошаговой инструкции что делать. Т.е. достали из упаковки, как всегда аккуратно уложенной почтой, снял джамперы стабилизаторов питания (чтобы отключить их), подключил питание, проверил, что тестовая прошивка работает - мигает светодиодами. Затем снял джампер PROG (находится он там-то там-то, картинка), чтобы можно было запрогать. Установил на комп AVR Studio версии 4 (можно и для 5 написать, если есть различия), выбрал программатор, AVR-ку, создал проект, настроил, открыл пример, прошил, нашел в логах прошивки сообщение "OK".
Иначе теряется изначальный замысел Open Robotics, ведь для того чтобы разобраться хотя бы с 1 проектом(не имея опыт в программировании МК) необходимо перешуровать все документы, инструкции и посты на 18 страницах.
Третье, почему нет форума поддержки пользователей для каждого из проекта роботов, а только для комплектующих? Есть форум для контроллера, для датчика линий, а вот для робота в сборке нет.
И в итоге получается, что чтобы в этом все разобраться, необходимо иметь опыт в программирования МК, электроники. Не противоречит ли это Open Robotics?
P.S. Пост родился в понимании, что нельзя перепрошить OR-AVR-M32-D через OR-USB-UART как бы это смешно не звучало. Еще вопрос, можно же имея в наличии программатор AVR910 прошить данный контроллер?
как бы это смешно не звучало. Еще вопрос, можно же имея в наличии программатор AVR910 прошить данный контроллер?
Первое, что не хватает, это полного списка комплектующих для проекта. Я сейчас имею в виду страничку с OR-LT-v2. Ведь там нет программатора. Да я понимаю, что это логично, но для новичка или чайника это не очевидно. Можно сделать после "прочих компонентов" категорию "Смотрите также", где будет OR-PROG-USB - программатор от OR-команды, без него вы не сможете перепрошить(изменить программу) вашего робота; OR-USB-UART - модуль для общения и отладки с вашим контроллером OR-AVR-M32-D.
Второе, как заметили выше, пошаговой инструкции что делать. Т.е. достали из упаковки, как всегда аккуратно уложенной почтой, снял джамперы стабилизаторов питания (чтобы отключить их), подключил питание, проверил, что тестовая прошивка работает - мигает светодиодами. Затем снял джампер PROG (находится он там-то там-то, картинка), чтобы можно было запрогать. Установил на комп AVR Studio версии 4 (можно и для 5 написать, если есть различия), выбрал программатор, AVR-ку, создал проект, настроил, открыл пример, прошил, нашел в логах прошивки сообщение "OK".
Иначе теряется изначальный замысел Open Robotics, ведь для того чтобы разобраться хотя бы с 1 проектом(не имея опыт в программировании МК) необходимо перешуровать все документы, инструкции и посты на 18 страницах.
Третье, почему нет форума поддержки пользователей для каждого из проекта роботов, а только для комплектующих? Есть форум для контроллера, для датчика линий, а вот для робота в сборке нет.
И в итоге получается, что чтобы в этом все разобраться, необходимо иметь опыт в программирования МК, электроники. Не противоречит ли это Open Robotics?
P.S. Пост родился в понимании, что нельзя перепрошить OR-AVR-M32-D через OR-USB-UART
как бы это смешно не звучало. Еще вопрос, можно же имея в наличии программатор AVR910 прошить данный контроллер?-

MaPTbIH - Сообщения: 34
- Зарегистрирован: 20 фев 2011, 14:56
- Откуда: Самара
- прог. языки: C++ PHP ActionScript LabVIEW
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() MaPTbIH » 31 июл 2011, 16:17
MaPTbIH » 31 июл 2011, 16:17
MaPTbIH писал(а):P.S. Пост родился в понимании, что нельзя перепрошить OR-AVR-M32-D через OR-USB-UART
Прошил ваш OR-AVR-M32-D, для этого использовал программатор типа AVR910
Этот вопрос снят. Свои грабли опишу, как буду готов.-
MaPTbIH - Сообщения: 34
- Зарегистрирован: 20 фев 2011, 14:56
- Откуда: Самара
- прог. языки: C++ PHP ActionScript LabVIEW
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() =DeaD= » 31 июл 2011, 16:33
=DeaD= » 31 июл 2011, 16:33
MaPTbIH писал(а):P.S. Пост родился в понимании, что нельзя перепрошить OR-AVR-M32-D через OR-USB-UART
Вообще мы свои новые контроллеры теперь стараемся поставлять с бутлоадерами, т.е. как раз чтобы можно было прошивать через OR-USB-UART... хотя OR-AVR-M32-D был поставлен в магазин достаточно давно и мог быть без бутлоадера. Вот тут есть бутлоадер: [[Файлы Open Robotics]], можете его залить через AVR910.
-

=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() Amper91 » 09 авг 2011, 18:40
Amper91 » 09 авг 2011, 18:40
кстати, еще раз подтверждаю, модуль спокойно шьется 5вольтовым программатором, только джамперы с 3.3 и 5 снять
думаю, это можно и в вику записать (со всеми предупреждениями)
Добавлено спустя 3 минуты 30 секунд:
вот только никак не получается наладить связь с ПК через max3232... зашивал orfa 0.8.2 (последняя доступная для M32)
Добавлено спустя 21 минуту 29 секунд:
хотя тут скорее проблема в связи между пк и модулем, чем в прошивке или модуле...
проблема локализована до самой max3232, странно, но уже 3й образец не хочет корректно работать...
tx-rx на самом порте работают нормально, uart тоже вроде работает (пока нет возможности проверить точно)
на max3232 на выходе ничего не меняется...
думаю, это можно и в вику записать (со всеми предупреждениями)
Добавлено спустя 3 минуты 30 секунд:
вот только никак не получается наладить связь с ПК через max3232... зашивал orfa 0.8.2 (последняя доступная для M32)
Добавлено спустя 21 минуту 29 секунд:
хотя тут скорее проблема в связи между пк и модулем, чем в прошивке или модуле...
проблема локализована до самой max3232, странно, но уже 3й образец не хочет корректно работать...
tx-rx на самом порте работают нормально, uart тоже вроде работает (пока нет возможности проверить точно)
на max3232 на выходе ничего не меняется...
- Amper91
- Сообщения: 24
- Зарегистрирован: 23 май 2011, 01:02
- Откуда: Москва
- прог. языки: C
- ФИО: Алексей
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() Amper91 » 09 авг 2011, 23:02
Amper91 » 09 авг 2011, 23:02
отбой, все работает!
зы: всегда проверяйте качество обжимки разъемов)
зы: всегда проверяйте качество обжимки разъемов)
- Amper91
- Сообщения: 24
- Зарегистрирован: 23 май 2011, 01:02
- Откуда: Москва
- прог. языки: C
- ФИО: Алексей
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() Amper91 » 10 авг 2011, 12:40
Amper91 » 10 авг 2011, 12:40
не получается установить связь на скорости, отличной от 2400 бод
при этом через лоадер прошивка зашилась на 115200 вполне успешно
при этом через лоадер прошивка зашилась на 115200 вполне успешно
- Amper91
- Сообщения: 24
- Зарегистрирован: 23 май 2011, 01:02
- Откуда: Москва
- прог. языки: C
- ФИО: Алексей
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() moldov » 27 авг 2011, 00:26
moldov » 27 авг 2011, 00:26
=DeaD= писал(а):MaPTbIH писал(а):P.S. Пост родился в понимании, что нельзя перепрошить OR-AVR-M32-D через OR-USB-UART
Вообще мы свои новые контроллеры теперь стараемся поставлять с бутлоадерами, т.е. как раз чтобы можно было прошивать через OR-USB-UART... хотя OR-AVR-M32-D был поставлен в магазин достаточно давно и мог быть без бутлоадера. Вот тут есть бутлоадер: [[Файлы Open Robotics]], можете его залить через AVR910.
Подскажите, а по какому условию прошиваться. Т.е. залил бутлоадер, подключился к UART, а дальше?
- moldov
- Сообщения: 20
- Зарегистрирован: 07 фев 2010, 05:20
- Откуда: Южно-Сахалинск
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() =DeaD= » 27 авг 2011, 07:59
=DeaD= » 27 авг 2011, 07:59
Нажимете RESET на контроллере и сразу запускаете программирование на ПК - бутлоадер некоторое время (примерно 3 секунды) после RESET активен, если заливка не началась - он передаёт управление основной программе.
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() moldov » 28 авг 2011, 02:28
moldov » 28 авг 2011, 02:28
Спасибо. А можно исходники лоадера.
- moldov
- Сообщения: 20
- Зарегистрирован: 07 фев 2010, 05:20
- Откуда: Южно-Сахалинск
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() moldov » 28 авг 2011, 07:03
moldov » 28 авг 2011, 07:03
=DeaD= писал(а):Нажимете RESET на контроллере и сразу запускаете программирование на ПК - бутлоадер некоторое время (примерно 3 секунды) после RESET активен, если заливка не началась - он передаёт управление основной программе.
Подскажите какие-нибудь фьюзы надо менять при заливке самого лоадера на контроллер? И еще вопрос, а прошивку чем отправлять Xmodem'ом?
- moldov
- Сообщения: 20
- Зарегистрирован: 07 фев 2010, 05:20
- Откуда: Южно-Сахалинск
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() =DeaD= » 28 авг 2011, 07:51
=DeaD= » 28 авг 2011, 07:51
Фьюзы - да, надо. Не помню навскидку какие 
Исходники подцепил.
Исходники подцепил.
- Вложения
-
 avrprog_boot_v0_85.zip
avrprog_boot_v0_85.zip- (269.35 КиБ) Скачиваний: 0
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() S-T-A-L-K-E-R » 30 янв 2012, 22:45
S-T-A-L-K-E-R » 30 янв 2012, 22:45
В чем проблема ?
-

S-T-A-L-K-E-R - Сообщения: 314
- Зарегистрирован: 05 ноя 2009, 10:10
- Откуда: Санкт-Петербург vs Мурманск
- Skype: sergey199100
- прог. языки: С, C++, C++++, Delphi, Pascal, Asm
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() =DeaD= » 31 янв 2012, 07:38
=DeaD= » 31 янв 2012, 07:38
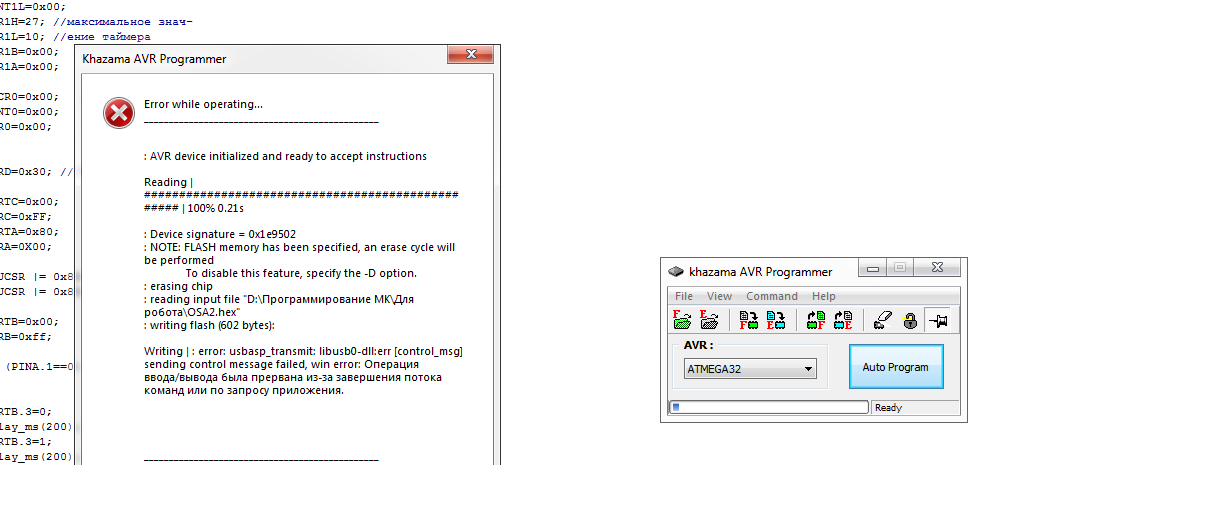
Пока в том, что тут слишком мало информации. Как выставлены джамперы, особенно PROG? До этого модуль нормально программировался? Другие прошивки заливаются? Что за HEX-файл прошиваете, выложите сюда.
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Модуль OR-AVR-M32-D: Контр. на базе ATMega32 с портом ДД
![]() S-T-A-L-K-E-R » 31 янв 2012, 11:01
S-T-A-L-K-E-R » 31 янв 2012, 11:01
Модуль новый, не разу не прошитый.
Другие прошивки не заливаются.
Все джамперы стоят как стояли.
Джампер PROG не включен.
А еще сейчас я нашел брак в вашем изделии ! джамперы PA и PBCD не подключаемы, т.е. не стоит разъем, который соединял бы как надо. Но об браке потом. Сейчас важен тот факт, почему не прошивается. ? Путь я указывал прям из каталога С, название проекта на английском.
Скомпилено без ошибок. В программе простое мигание СД на ножке B3.
Другие прошивки не заливаются.
Все джамперы стоят как стояли.
Джампер PROG не включен.
А еще сейчас я нашел брак в вашем изделии ! джамперы PA и PBCD не подключаемы, т.е. не стоит разъем, который соединял бы как надо. Но об браке потом. Сейчас важен тот факт, почему не прошивается. ? Путь я указывал прям из каталога С, название проекта на английском.
Скомпилено без ошибок. В программе простое мигание СД на ножке B3.
-
S-T-A-L-K-E-R - Сообщения: 314
- Зарегистрирован: 05 ноя 2009, 10:10
- Откуда: Санкт-Петербург vs Мурманск
- Skype: sergey199100
- прог. языки: С, C++, C++++, Delphi, Pascal, Asm
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 1