| |
roboforum.ruТехнический форум по робототехнике. |
|
Сборка механики тип "А" МиниБота 2.0
Сообщений: 3
• Страница 1 из 1
-

EdGull - Сообщения: 10211
- Зарегистрирован: 28 дек 2004, 20:33
- Откуда: Тольятти
- Skype: Ed_Gull
- прог. языки: Bascom AVR Basic
- ФИО: Гуль Эдуард Викторович
Re: Сборка типовой механики МиниБота 2.0
![]() Qzen » 19 апр 2009, 16:09
Qzen » 19 апр 2009, 16:09
Решил создать этот мануал для тех, кто не знает, как собрать типовую механику 2.0. За подробное описание этого мне особенное спасибо EdGull'у. Пусть те два часа общения не пройдут даром для него.
Уточнять комплект поставки, думаю, нет смысла - он у всех одинаковый.
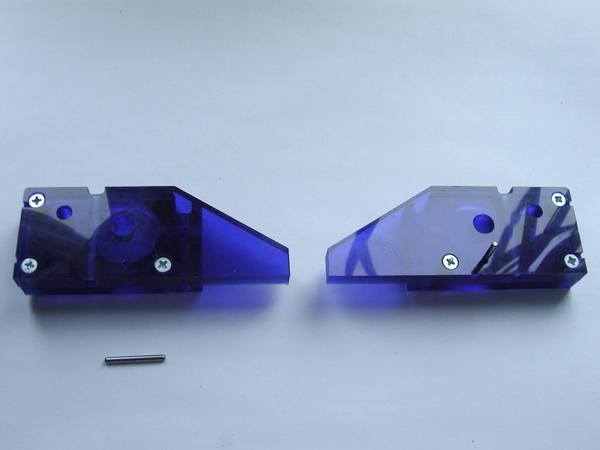
Первым делом нам потребуются детали, представленные на рис.1
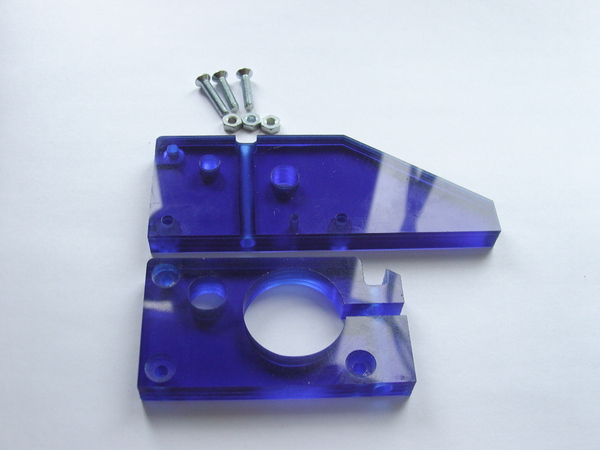
Сразу уточню, гайки вставляются в специально проточенные для них пазы, впрочем, как и головки болтов уходят в расточенные для них углубления.
После сборки получим одну из ножек(один из корпусов редуктора), как представлено на рис.2:
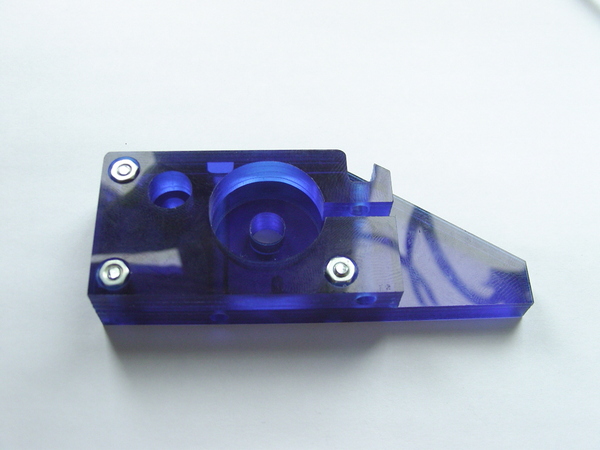
Таким же образом собираем вторую "ножку".
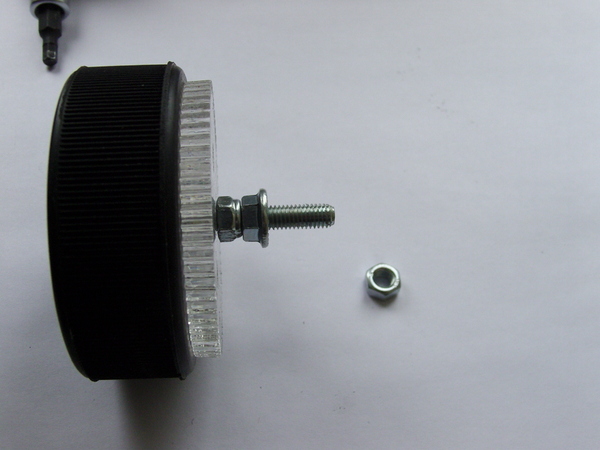
Следующим пунктом нашего плана будет колесо, все, что для него нужно представлено на рис.3:
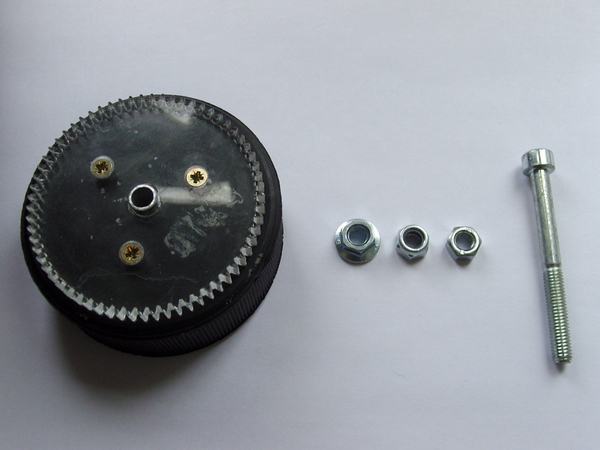
Сразу оговорюсь, что здесь три вида гаек: одна с пластиковой вставкой, вторая обычная,третья с пресс шайбой
На рис.4 представлены все элементы в последовательности их надевания на винт колеса:
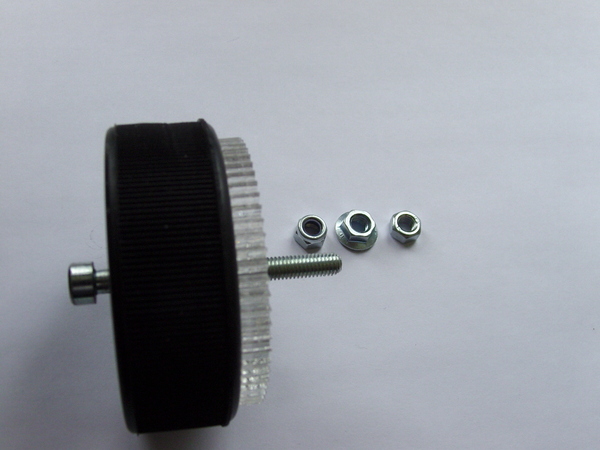
Из-за пластиковой вставки гаечка будет накручиваться достаточно тяжело, но нам это на пользу:При эксплуатации колесо постоянно будет находиться в одном состоянии и гайка не раскрутиться. Закрепить гайку стоит так, чтобы колесо свободно вращалось между головкой винта и гайкой, но при этом не было люфта.Затем к гайке добавляем Гайку с пресс шайбой почти вплотную. Должна получиться конструкция, представленная ниже:
Третья гайка служит для закрепления колеса в "ножке"(редукторе), но это будет показано ниже.
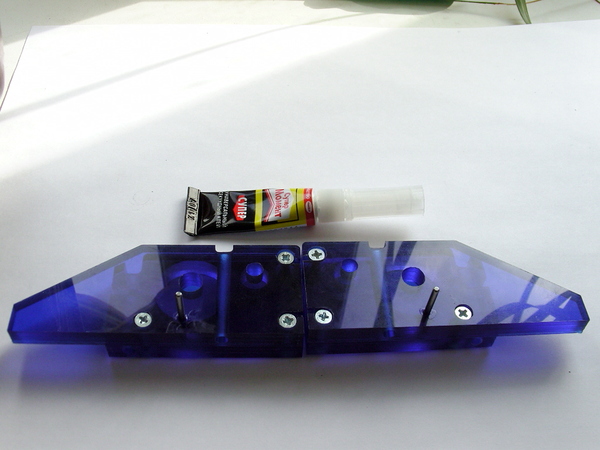
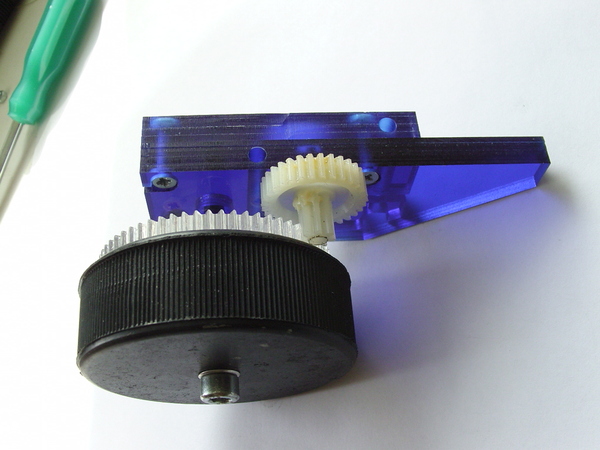
Теперь же берём металлическую ось, лежащую в пакетике с шестерёнками. Обязательно протрите её чем-нибудь. Затем, один её конец смажьте суперклеем и вставьте в уже собранные "ножки"(редуктора), как это показано снизу:
Проверьте, плотно ли держится ось. В итоге должно получиться следующее:
Затем, берём собранное колесо, шестерёнку и одну из "Ножек" и собираем как на рисунке ниже:
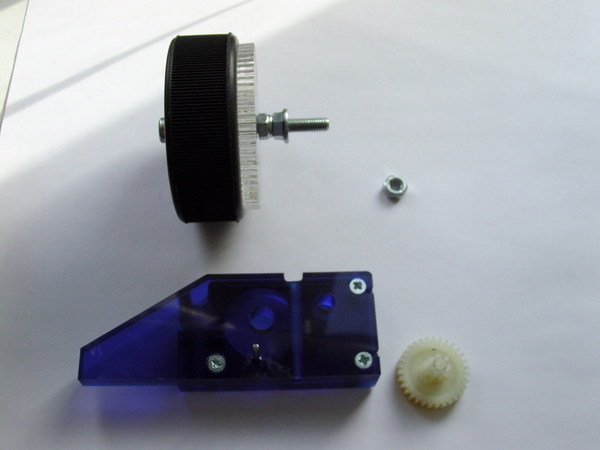
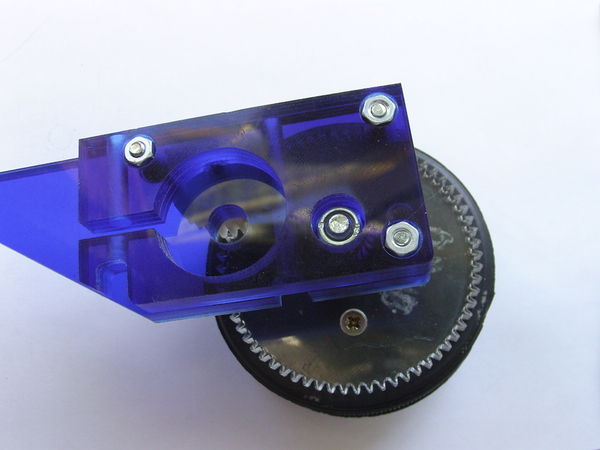
Стоит затяните гайки так, чтобы гайка с пресс шайбой и гайка на рисунке выше сдерживала корпус "ножки", а колесо при этом свободно вращалось и крутило шестерню. Аналогично соберите вторую "ножку", затем вставьте моторчики в углубление так, чтобы шестерёнка моторчика полностью вышла за пределы корпуса и встала в зацепление с пластиковой шестерёнкой. Проблем возникнуть не должно. А данная конструкция будет вращаться не так свободно, но и не так сложно. Если вращение колеса требует большого усилия - отрегулируйте выход колеса за пределы корпуса с помощью гаек.
Затем отложите две получившиеся ножки и возьмите основную платформу и детали с рисунка ниже:
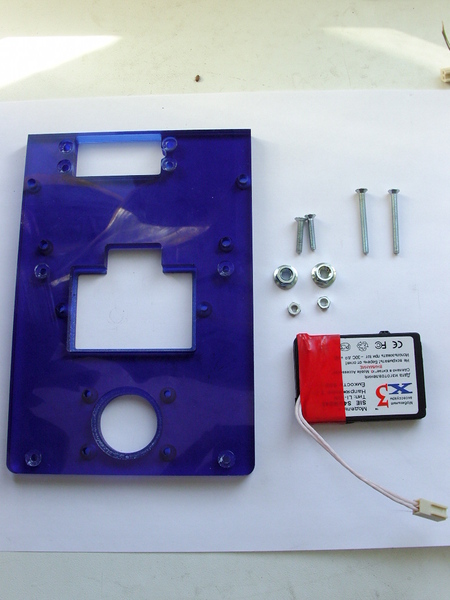
Маленькие болты подойдут для тех, кто делает минибот с одним аккумулятором. Для тех, кто хочет подключить несколько аккумуляторов сразу потребуются болты 30мм, показанные на рисунке справа.
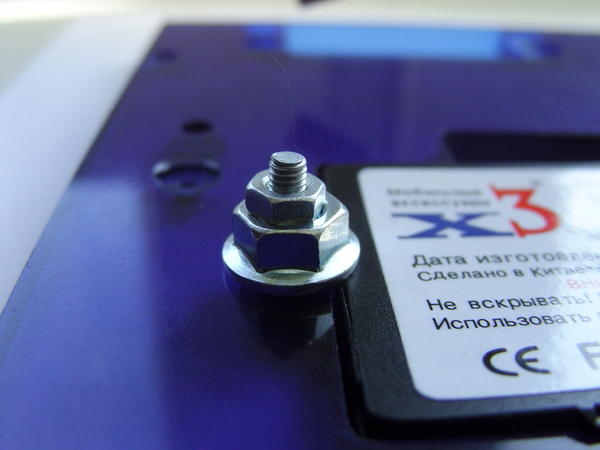
Вставляем аккумулятор в отверстие вместе в двумя болтами(их головки снова должны войти в углубления, как показано на рисунке ниже:

Затем на винты сажаются две гайки с пресс шайбой и всё это сверху закрепляется обычными гаечками:
Затем устанавливаем динамик и подруливающее колесо:
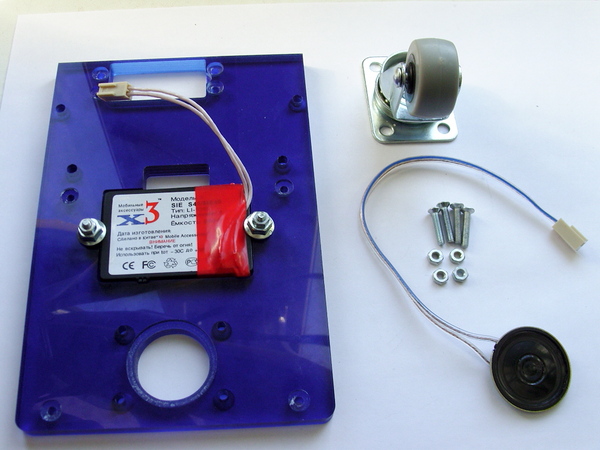
Динамик устанавливается резонатором вниз, проводом в сторону АКБ, подруливающее колесо одевается на 4 коротких болта, как показано на рисунке:

Итак, осталось совсем немного:
Мы имеем две полностью собранные ножки-редукторы с колесом, имеем платформу, осталось только их соединить!
Соединяем их с помощью двух болтов 40мм и двух болтов 35мм. 35-ти миллиметровые болты служат так же для затяжки хамутов. ВНИМАНИЕ! Осторожно затягивайте хомуты - оргстекло очень легко может треснуть.Лично у меня моторчики вошли с натягом в отверстия, поэтому дополнительно особой стяжки не потребовалось.
Итак, платформа собрана. Переверните её колсами вверх и вставьте 4 коротких болта в отверстия так, чтобы резьбовая часть выходила наверх. Поочерёдно присоедините каждую ножку платы к соответствующему болту.
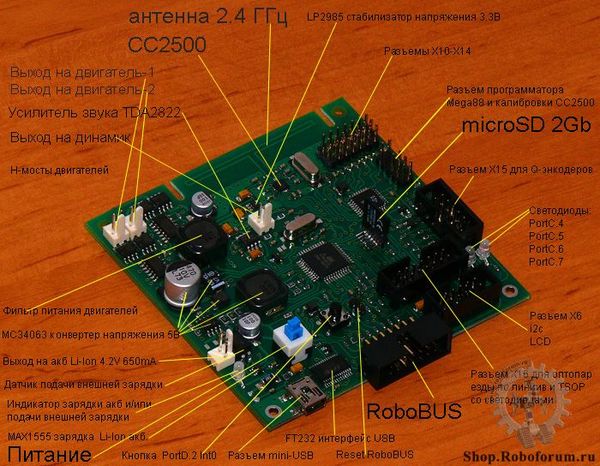
Советую прежде, чем прикручивать плату подсоединить все провода(протянутые через отверстие возле АКБ)в соответствии с рисунком:
====
Ваша механика собрана, поздравляю
===========
При сборке (лично у меня) не хватило болтиков и гаечек(хотя я даже несколько штук сам докупил), поэтому решил вконце подсчитать количество расходных материалов ДЛЯ МЕХАНИКИ С ОДНИМ АКБ(более чем с одним акб).
Болт короткий - 16 штук(14 штук)
Болт средний(30 мм)- 0 шт(2 шт)
Болт средний (35 мм) - 2шт(2 шт)
Болт длинный (40 мм) - 2 шт(2 шт)
Гайка с пресс шайбой - 4 шт(4 шт)
Гайка большая для закрепления колеса - 2 шт(2 шт)
Гайка большая с пластиковой вставкой - 2 шт(2 шт)
Гайка маленькая - 16 шт(16 шт)
Болт большой с разъёмом под шестигранный ключ - 2 шт(2 шт)
====
В остальном у всех все одинаково, поэтому уточнять не буду.
Хорошего вам роботостроения!
Уточнять комплект поставки, думаю, нет смысла - он у всех одинаковый.
Первым делом нам потребуются детали, представленные на рис.1
Сразу уточню, гайки вставляются в специально проточенные для них пазы, впрочем, как и головки болтов уходят в расточенные для них углубления.
После сборки получим одну из ножек(один из корпусов редуктора), как представлено на рис.2:
Таким же образом собираем вторую "ножку".
Следующим пунктом нашего плана будет колесо, все, что для него нужно представлено на рис.3:
Сразу оговорюсь, что здесь три вида гаек: одна с пластиковой вставкой, вторая обычная,третья с пресс шайбой
На рис.4 представлены все элементы в последовательности их надевания на винт колеса:
Из-за пластиковой вставки гаечка будет накручиваться достаточно тяжело, но нам это на пользу:При эксплуатации колесо постоянно будет находиться в одном состоянии и гайка не раскрутиться. Закрепить гайку стоит так, чтобы колесо свободно вращалось между головкой винта и гайкой, но при этом не было люфта.Затем к гайке добавляем Гайку с пресс шайбой почти вплотную. Должна получиться конструкция, представленная ниже:
Третья гайка служит для закрепления колеса в "ножке"(редукторе), но это будет показано ниже.
Теперь же берём металлическую ось, лежащую в пакетике с шестерёнками. Обязательно протрите её чем-нибудь. Затем, один её конец смажьте суперклеем и вставьте в уже собранные "ножки"(редуктора), как это показано снизу:
Проверьте, плотно ли держится ось. В итоге должно получиться следующее:
Затем, берём собранное колесо, шестерёнку и одну из "Ножек" и собираем как на рисунке ниже:
Стоит затяните гайки так, чтобы гайка с пресс шайбой и гайка на рисунке выше сдерживала корпус "ножки", а колесо при этом свободно вращалось и крутило шестерню. Аналогично соберите вторую "ножку", затем вставьте моторчики в углубление так, чтобы шестерёнка моторчика полностью вышла за пределы корпуса и встала в зацепление с пластиковой шестерёнкой. Проблем возникнуть не должно. А данная конструкция будет вращаться не так свободно, но и не так сложно. Если вращение колеса требует большого усилия - отрегулируйте выход колеса за пределы корпуса с помощью гаек.
Затем отложите две получившиеся ножки и возьмите основную платформу и детали с рисунка ниже:
Маленькие болты подойдут для тех, кто делает минибот с одним аккумулятором. Для тех, кто хочет подключить несколько аккумуляторов сразу потребуются болты 30мм, показанные на рисунке справа.
Вставляем аккумулятор в отверстие вместе в двумя болтами(их головки снова должны войти в углубления, как показано на рисунке ниже:
Затем на винты сажаются две гайки с пресс шайбой и всё это сверху закрепляется обычными гаечками:
Затем устанавливаем динамик и подруливающее колесо:
Динамик устанавливается резонатором вниз, проводом в сторону АКБ, подруливающее колесо одевается на 4 коротких болта, как показано на рисунке:
Итак, осталось совсем немного:
Мы имеем две полностью собранные ножки-редукторы с колесом, имеем платформу, осталось только их соединить!
Соединяем их с помощью двух болтов 40мм и двух болтов 35мм. 35-ти миллиметровые болты служат так же для затяжки хамутов. ВНИМАНИЕ! Осторожно затягивайте хомуты - оргстекло очень легко может треснуть.Лично у меня моторчики вошли с натягом в отверстия, поэтому дополнительно особой стяжки не потребовалось.
Итак, платформа собрана. Переверните её колсами вверх и вставьте 4 коротких болта в отверстия так, чтобы резьбовая часть выходила наверх. Поочерёдно присоедините каждую ножку платы к соответствующему болту.
Советую прежде, чем прикручивать плату подсоединить все провода(протянутые через отверстие возле АКБ)в соответствии с рисунком:
====
Ваша механика собрана, поздравляю
===========
При сборке (лично у меня) не хватило болтиков и гаечек(хотя я даже несколько штук сам докупил), поэтому решил вконце подсчитать количество расходных материалов ДЛЯ МЕХАНИКИ С ОДНИМ АКБ(более чем с одним акб).
Болт короткий - 16 штук(14 штук)
Болт средний(30 мм)- 0 шт(2 шт)
Болт средний (35 мм) - 2шт(2 шт)
Болт длинный (40 мм) - 2 шт(2 шт)
Гайка с пресс шайбой - 4 шт(4 шт)
Гайка большая для закрепления колеса - 2 шт(2 шт)
Гайка большая с пластиковой вставкой - 2 шт(2 шт)
Гайка маленькая - 16 шт(16 шт)
Болт большой с разъёмом под шестигранный ключ - 2 шт(2 шт)
====
В остальном у всех все одинаково, поэтому уточнять не буду.
Хорошего вам роботостроения!
-

Qzen - Сообщения: 60
- Зарегистрирован: 22 мар 2009, 00:26
- Откуда: Москва
- Skype: qzen666
- прог. языки: C++
- ФИО: Михайлов Дмитрий

Сообщений: 3
• Страница 1 из 1
Вернуться в МиниБот — национальный класс роботов
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 1